刚刚,苹果基础模型团队负责人庞若鸣被Meta挖走!加入超级智能团队、年薪千万美元

苹果工程师庞若鸣即将加入Meta,后者为吸引其提供数千万美元薪酬。Meta正招聘多位顶尖AI领导者,包括前谷歌和苹果员工。
苹果工程师庞若鸣即将加入Meta,后者为吸引其提供数千万美元薪酬。Meta正招聘多位顶尖AI领导者,包括前谷歌和苹果员工。

用户对深层次、多步骤信息获取的需求。从医学研究到科技创新,从商业决策到学术探索,许多复杂问题的解决都

2025世界人工智能大会WAIC将于上海举行。机器之心推出【AI面对面】栏目,帮助企业通过企业专访、展馆探展等方式展示技术能力与愿景,实现品牌传播和影响力提升。

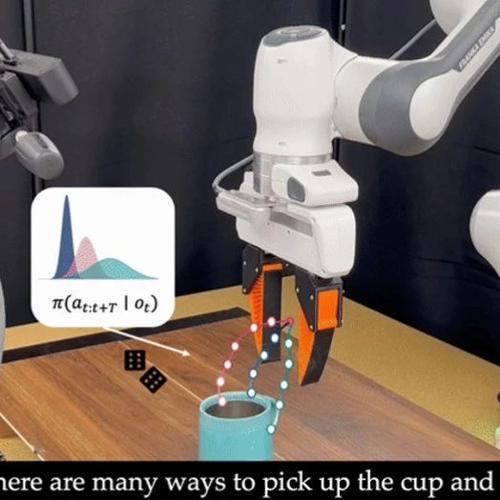
本文提出了一种名为RoboRefer的多模态大模型,能够理解三维空间关系并执行复杂的指令。它在空间指代任务上表现优异,并已应用于多种机器人系统中。

本周会员通讯聚焦MLLMs幻觉问题、AI公司运营等议题。研究发现长推理链下MLLMs产生更多幻觉,不同来源的幻觉表现差异大。多模态模型在视觉编码器设计与训练机制存在失衡现象,导致语言主导现象频发。
本文介绍了华为诺亚实验室发布的’人类最后的编程考试'(HLCE)基准测试,旨在评估当前大语言模型(LLM)在复杂编程任务上的表现。结果显示,即使是顶尖的大模型,在HLCE上也面临巨大挑战,单次尝试成功率仅15.85%或11.4%,与其它基准相比显著降低。研究发现LLM擅长推理但对交互式问题不足,且存在自我认知能力不强的问题。总体而言,尽管在测试时扩展规律上表现良好,LLM仍需进一步优化。