
一份关于如何通过物理模拟器和世界模型学习具身智能的全面调研
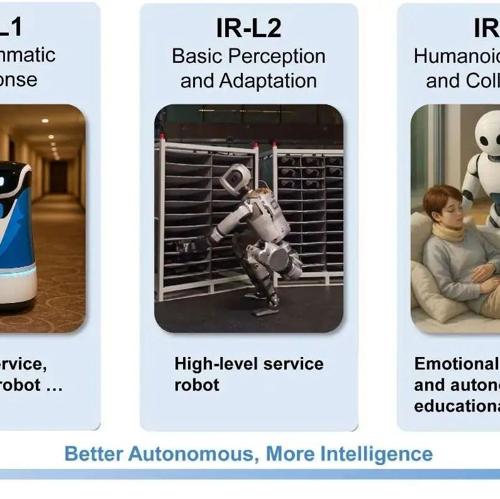
一份关于具身智能的学习调研文章,涵盖机器人运动、灵巧性与交互技术,提出IR-L0到IR-L4的智能机器人分级模型,并对比主流模拟器和世界模型的架构与应用场景。
一份关于具身智能的学习调研文章,涵盖机器人运动、灵巧性与交互技术,提出IR-L0到IR-L4的智能机器人分级模型,并对比主流模拟器和世界模型的架构与应用场景。

人形机器人独角兽Figure展示了利用强化学习实现的自然人形行走技术,机器人步态更像人、速度更快,并且在不同场景下均表现出优异性能。

最新发布的波士顿动力Atlas和宇树机器人G1侧空翻视频引发关注。Atlas演示了侧手翻动作,而G1则进行了一次真正的侧空翻。RAI Institute解释称Atlas采用的是强化学习策略生成行为训练数据。