
一份关于如何通过物理模拟器和世界模型学习具身智能的全面调研
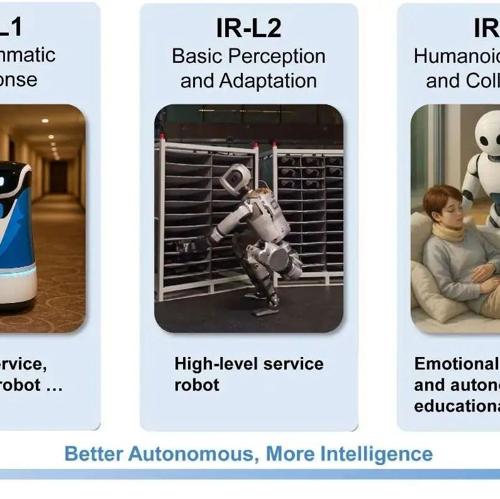
一份关于具身智能的学习调研文章,涵盖机器人运动、灵巧性与交互技术,提出IR-L0到IR-L4的智能机器人分级模型,并对比主流模拟器和世界模型的架构与应用场景。
一份关于具身智能的学习调研文章,涵盖机器人运动、灵巧性与交互技术,提出IR-L0到IR-L4的智能机器人分级模型,并对比主流模拟器和世界模型的架构与应用场景。
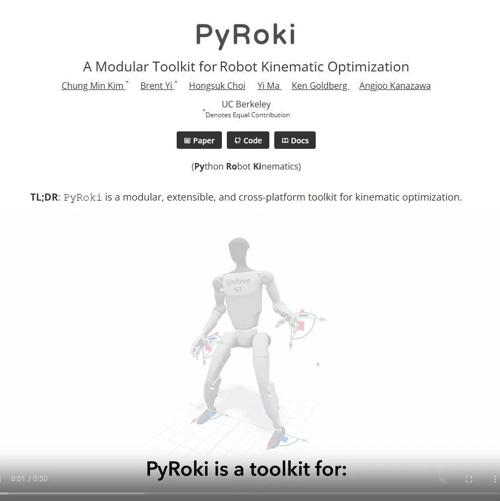
PyRoki 是一个为机器人运动优化设计的Python工具包,支持从URDF文件生成可微分的机器人运动学模型,并自动生成碰撞检测原语和集成Levenberg-Marquardt求解器以提升效率。