
月度归档: 2025 年 6 月

ICML 2025 何恺明的“残差连接”被魔改,新架构给Transformer建了个“动态立交”,28亿参数打平69亿
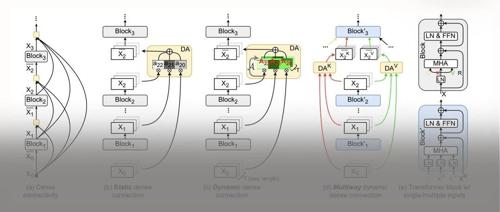
对Transformer中的残差连接进行了创新性改造,仅增加极少的参数和计算量,就让28亿参数的模型

Gemini 2.5 Pro API 免费回归!一文教你白嫖谷歌最强模型

Gemini 2.5 Pro实验版发布后备受好评,但谷歌于5月中旬关闭了免费层级的API访问通道。经过近一个月的时间,谷歌重新开放了这一功能,并提供了详细的使用指南和第三方客户端介绍。

IEEET-ASE|基于视触觉传感器的柔性接触仿真与操作学习
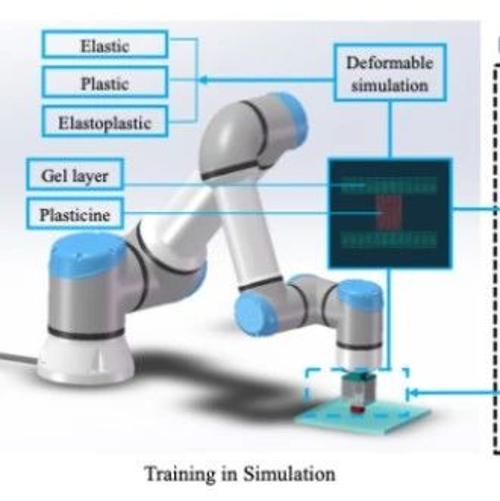
北京邮电大学方斌教授团队联合国内外多家机构发布了一款基于视触觉传感器的柔性接触仿真与操作学习系统,该系统涵盖了软接触仿真、操作学习和Sim-to-real实验等多个环节。研究成果发表于IEEE Transactions on Automation Science and Engineering期刊。
割草机器人激光雷达怎么选?

割草机器人对激光雷达的需求包括高分辨率、高可靠性和长寿命。文章指出,只有高分辨率的激光雷达才能识别庭院中的小障碍物和地形变化,而高可靠性则需考虑防水、防尘及高低温适应性等方面。
面对具身智能数据瓶颈问题!孙富春、赵明国、王鹤、庞江淼、赵同阳、仉尚航、卢宗青、高阳、唐剑都有怎样的思考?
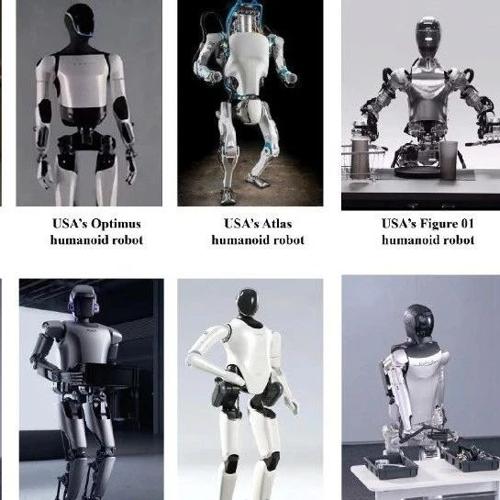
据直接决定了智能体能否从虚拟训练环境无缝迁移至复杂多变的物理世界,并实现稳定可靠的交互与决策。
与大
