
IEEET-ASE|基于视触觉传感器的柔性接触仿真与操作学习
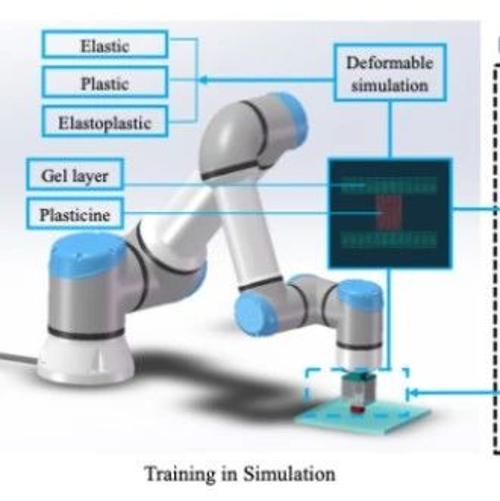
北京邮电大学方斌教授团队联合国内外多家机构发布了一款基于视触觉传感器的柔性接触仿真与操作学习系统,该系统涵盖了软接触仿真、操作学习和Sim-to-real实验等多个环节。研究成果发表于IEEE Transactions on Automation Science and Engineering期刊。
北京邮电大学方斌教授团队联合国内外多家机构发布了一款基于视触觉传感器的柔性接触仿真与操作学习系统,该系统涵盖了软接触仿真、操作学习和Sim-to-real实验等多个环节。研究成果发表于IEEE Transactions on Automation Science and Engineering期刊。
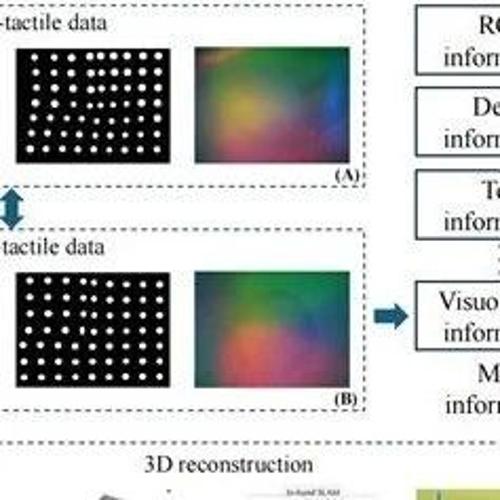
多模态数据集中的视触觉传感器综述论文总结了视触觉信息的生成方法及其应用。文章介绍了基于物理和学习的技术,涵盖了弹性体模拟、光学模拟、标记物运动模拟及跨模态与真实迁移生成方法,并提出标准化评价规则。

软体肌电假肢手通过灵巧的软体手指和‘一对多’映射的肌电交互接口提高了截肢者使用假肢手操作鼠标的任务性能和用户体验,显著缩短了用户的任务完成时间。