
CVPR 2025 双目匹配新突破!DEFOM-Stereo高效利用单目深度基础模型

本文介绍了一种基于深度基础模型的循环双目匹配框架DEFOM-Stereo,该框架利用Depth Anything V2的强大预训练ViT和随机初始化的CNN构建联合编码器,并设计了用于单目视差初始化、尺度更新的方法。实验结果表明,在仿真域到真实域的零样本泛化上以及在线Benchmark中均表现优异。
本文介绍了一种基于深度基础模型的循环双目匹配框架DEFOM-Stereo,该框架利用Depth Anything V2的强大预训练ViT和随机初始化的CNN构建联合编码器,并设计了用于单目视差初始化、尺度更新的方法。实验结果表明,在仿真域到真实域的零样本泛化上以及在线Benchmark中均表现优异。
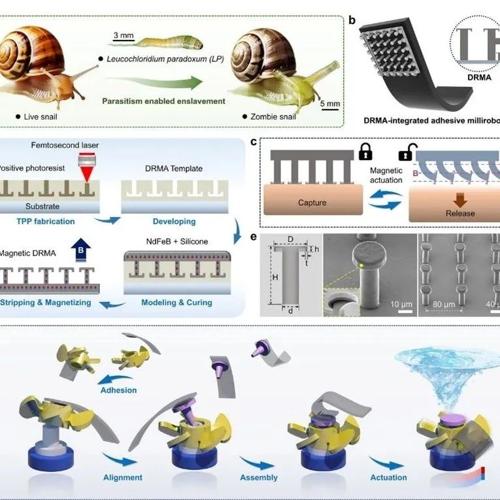
上海交通大学团队开发出一种两栖粘附磁驱微型机器人,能够在空气和水中自如切换并操控多种目标。该研究发表于《Advanced Materials》期刊,提出利用双折返微阵列结构实现可靠粘附力,并展示其在干湿环境中的应用优势及多模态运动控制能力。

北京智同精密传动科技有限责任公司在北京市经济技术开发区举行高精密减速机研发及总部生产基地项目奠基仪式。总投资3亿元,计划2027年投产。项目涵盖多个核心设施,将大幅提升企业的研发和生产能力。

德州大学奥斯汀分校的研究团队使用Transformer和离线强化学习训练出一个宝可梦对战智能体,它能利用人类历史对战数据进行学习,并在全球排名中取得前10%的成绩。

谷歌新模型Gemini 2.5 Flash在高尔顿板测试中表现出色,击败多个AI模型。其性能超越Gemini 2.5 Pro,并被认为是对AI编码的重大突破。




