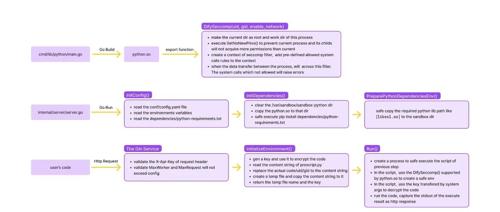
Cursor 1.2 更新!Agent 更会规划+支持排队,Pro 套餐限制:突发额度用完,要么等冷却要么付费。

(Agent To-dos)
代理将工作分解为清晰的待办事项列表
那些需要好几步才能完成的复杂任务,
(Agent To-dos)
代理将工作分解为清晰的待办事项列表
那些需要好几步才能完成的复杂任务,
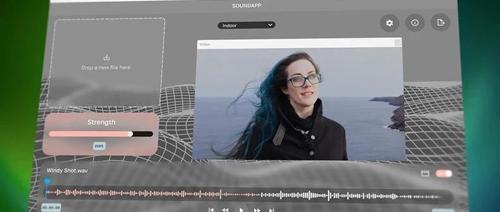
Boris FX CrumplePop更新至2025.5版本,引入新的SoundApp独立应用程序简化音频清理工作流程。支持Mac和Windows系统,包含去除风噪声、回音、交通噪声等AI模型。

研究提出了一种基于推理的深度研究代理,能够自主分析和整合多源信息以完成复杂的研究任务。该代理在OpenAI的多项评测中表现出色,并受到学术界的广泛关注。

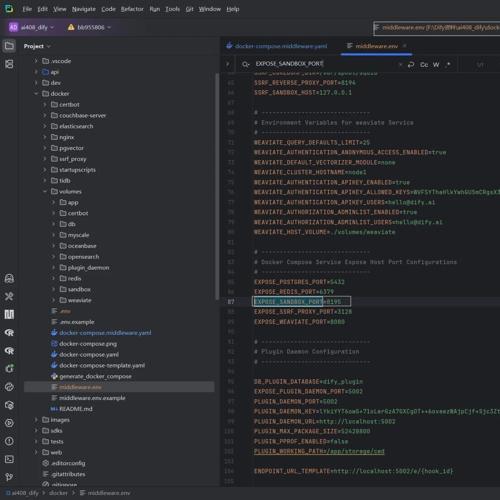
Python代码运行时遇到’xxx.so: cannot open shared object file: No such file or directory’错误,需在config.yaml中添加缺失的.so路径以解决。
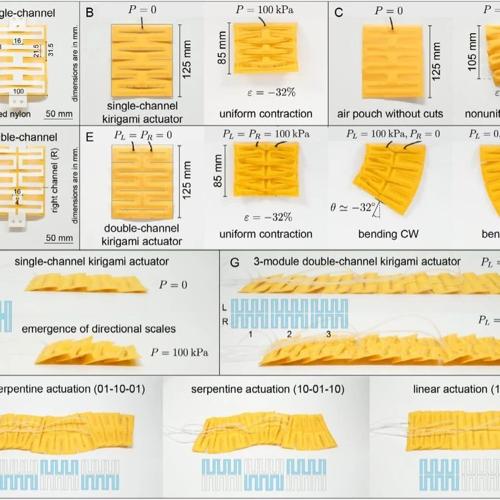
南丹麦大学团队开发出基于剪纸原理的充气式软体爬行机器人,在各种复杂地形上实现高效移动。这种机器人由柔性材料制成,通过巧妙设计和气动控制模拟蛇类运动。

苏州航凯微电子技术有限公司推出多模态触觉传感器,克服传统薄膜压力传感器局限性,让机器人灵巧手能够精准感知外部世界。该传感器具有高精度测量、多模态感知、快速响应和性能稳定等优势,在工业抓取、精密操作等领域展现出强大环境感知能力与广泛场景适配性。