从零开始自主「起身站立」,上海AI Lab发布最新控制算法,机器人:起猛了

上海AI Lab研究团队提出HoST算法,让机器人成功实现多种复杂环境下的自主站起。通过强化学习和多项技术优化,在仿真及真实环境中均表现出色,为人形机器人的实际应用提供了创新解决方案。
上海AI Lab研究团队提出HoST算法,让机器人成功实现多种复杂环境下的自主站起。通过强化学习和多项技术优化,在仿真及真实环境中均表现出色,为人形机器人的实际应用提供了创新解决方案。

本文介绍了一篇关于视觉语言动作模型(VLAs)的论文,提出了RoboVLMs模型来解决机器人领域的多个任务。文章通过实验提出了一些设计准则,包括选择合适的基座模型和在预训练阶段引入跨本体数据等。
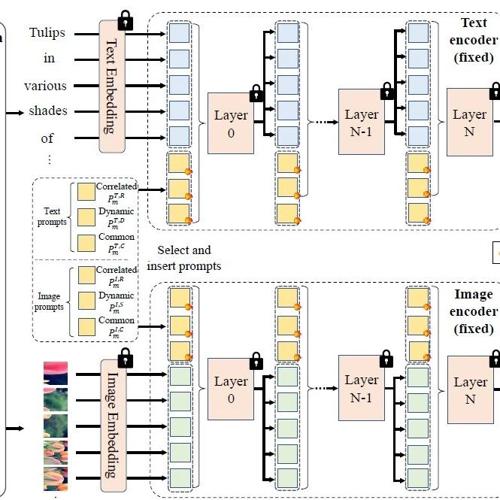
本文提出了一种新的提示学习方法,旨在解决多模态大模型在输入模态可能缺失时的问题。通过结合三种不同的提示向量策略(Correlated prompting, Dynamic prompting和Modal-common prompting),该方法能更有效地提升模型的鲁棒性和可扩展性,在多个数据集上验证了其有效性。