
鲁棒性

入选CVPR 2025,哈工大团队提出分层蒸馏多示例学习框架HDMIL,快速处理千兆像素病理全切片图像

授和张永兵教授团队,创新提出一种分层蒸馏多示例学习框架
HDMIL,旨在快速识别不相关的 patch

Token刺客来袭!AgentPrune一键屏蔽废话智能体,成本暴降60%性能翻盘

由同济大学、香港中文大学等机构提出的新技术AgentPrune,通过多智能体剪枝技术解决基于大模型的多智能体系统中的通信冗余问题。该技术能大幅降低通信开销,提升系统的鲁棒性和任务完成效率。
ICLR25|突破传统微调的知识编辑新范式!北京通用人工智能研究院、中科大、北大提出In Context Editing!
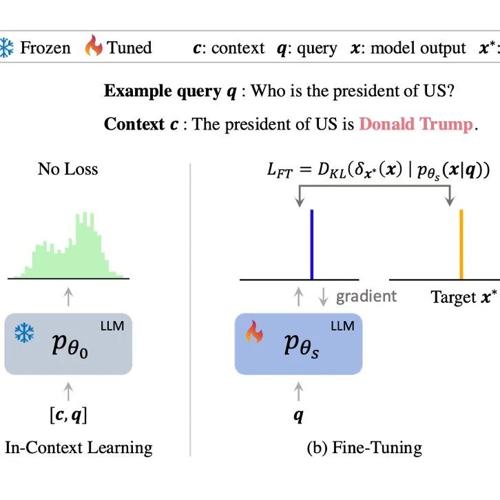
大、北大提出
In Context Editing
,这是一种突破传统微调,从自诱导分布中学习知识的



阿里开源R1-Omni,DeepSeek同款RLVR首度结合全模态情感识别,网友:可解释性+多模态学习=下一代AI

阿里通义实验室薄列峰团队首次将RLVR应用于包含音频、动态视觉内容的全模态LLM,聚焦情感识别任务。研究发现模型在分布内和分布外数据集上均有显著提升,并能清晰分析不同模态的作用,目前这些模型已开源。
