
WebSocket

ROS MCP Server:自然语言控制机器人,从此告别复杂指令!
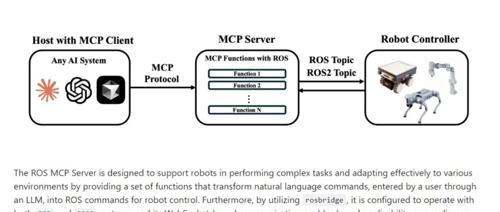
ROS MCP Server 是一个跨平台机器人控制框架,通过自然语言处理将用户指令转化为 ROS/ROS2 控制命令,支持多种操作系统和通信协议。
19K 标星!开源局域网文件传输神器,AirDrop 跨平台替代品!
Snapdrop 是一个基于浏览器的局域网文件传输工具,无需安装、注册或额外客户端。它利用 WebRTC 和 WebSocket 技术实现跨平台文件共享,安全且匿名,支持多种设备之间的即时文件传输。
ComfyUI MCP Server:轻量级的AI图像生成服务中间层
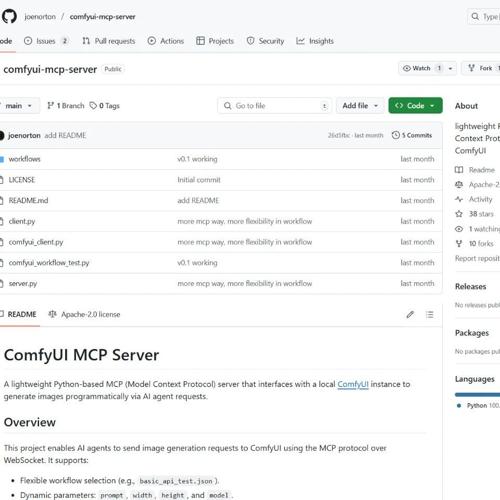
ComfyUI MCP Server利用WebSocket通信提供轻量级的AI图像生成服务中间层,支持动态参数设置、模块化结构和自定义节点映射等功能,提升响应效率和灵活性。
讨论一个技术问题,大模型流式返回
最近在对接GPT实现一个功能过程中遇到流式返回的问题,并介绍了从后端到前端如何适配流式返回的方案。文中提到websocket和SSE协议的区别以及使用Flux处理大模型流式返回的技术细节。