
机器人大讲堂
IJRR发表!中山大学研究团队提出Koopman-ILC系统,实现对连续体机器人数据驱动建模与迭代学习控制!
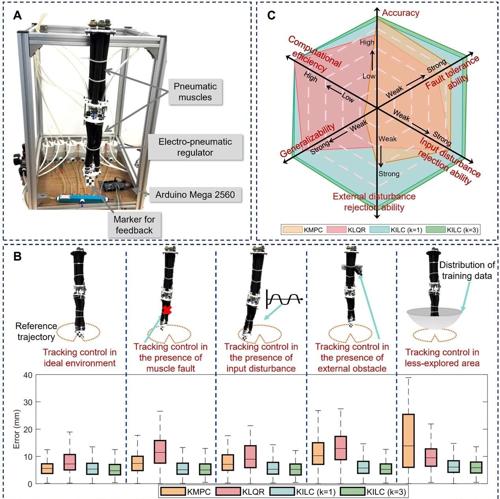
多领域具有重要应用价值。充分发挥其能力需要设计有效、高效且可靠的控制系统,而由于其结构复杂性,这一任


参会必看!5月29日张江具身智能开发者大会全指南:如何高效参会看这篇

2025张江具身智能开发者大会暨国际人形机器人技能大赛即将举办。活动包含主论坛、开发者论坛及技能大赛启动赛等多项内容,提供报名攻略和签到须知等服务。




