
 机器之心
机器之心

ChatGPT重大更新,能翻出所有历史对话,网友被AI聊破防了

OpenAI 推出新功能,ChatGPT 可以参考用户的所有聊天记录提供个性化的回复,并且更智能、个性化。新的记忆功能首批向部分用户推出,但需要在未来几周内逐渐部署。
闭环端到端精度暴涨19.61%!华科&小米汽车联手打造自动驾驶框架ORION,代码将开源
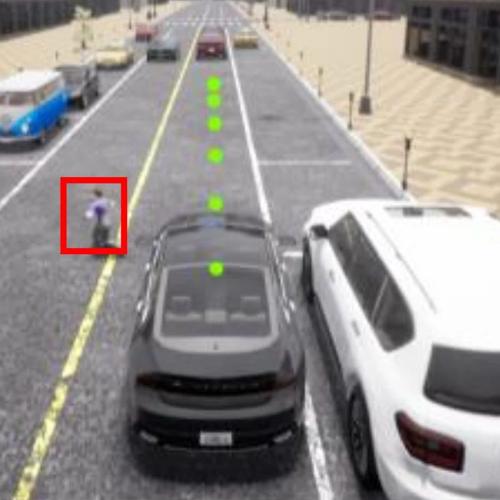
本文提出了一种新的端到端自动驾驶框架ORION,通过引入QT-Former聚合历史场景信息、VLM进行场景理解与指令生成以及生成模型对齐推理空间和动作空间,实现在闭环评测数据集Bench2Drive上的优异性能。


CVPR 2025 2D 大模型赋能3D Affordance 预测,GEAL助力可泛化的3D场景可交互区域识别

e Lee,团队其他成员还包括孔令东与黄田鑫博士。
主页:https://dylanorange.g


从零搭一套可复现、可教学、可观察的RL for VLM训练流程,我们试了试
MAYE 是一个从零实现的 RL for VLM 框架与标准化评估方案,旨在提升透明度和可复现性。它通过简化架构、提供标准评估体系及实证研究支持,帮助学者更清晰理解模型训练过程及其行为变化。
CVPR 2025 HighLight|打通视频到3D的最后一公里,清华团队推出一键式视频扩散模型VideoScene
清华大学研究团队提出VideoScene模型,实现视频到3D场景生成的‘一步式’方法。通过利用3D-aware leap flow distillation策略和动态降噪策略,大幅提升生成效率并保证高质量。