
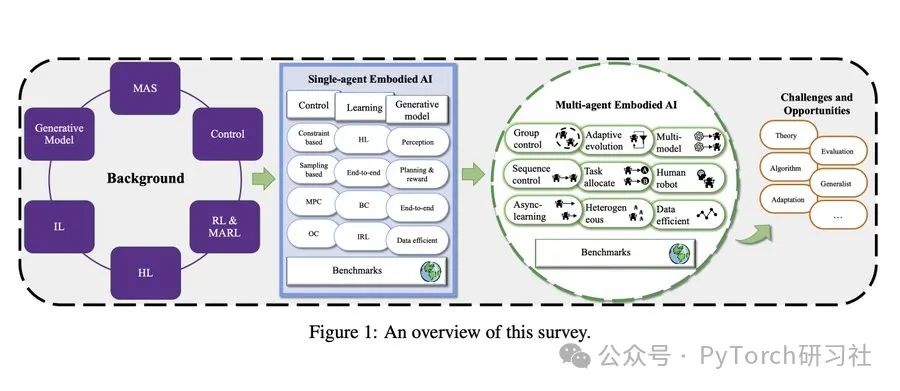
今天给大家分享一篇非常出色的综述论文,总结了当前Multi-Agent Embodied AI(多智能体具身智能)的研究进展。这篇文章不仅回顾了超过300篇相关论文,还从多个角度探讨了这个快速演化的领域将如何影响我们对智能体未来的构建方式。
🧭 为什么 Multi-Agent Embodied AI 很重要?
当前的大多数研究仍然集中在单一智能体的范式上。但我们所生活的真实世界却远比“一个智能体”复杂得多——它是开放的、异质的、动态变化的。
这篇综述论文强调了协作式、多智能体系统的必要性——尤其是在物理环境中感知、行动、学习并适应的智能体团队。随着机器人协作、智能制造、自动驾驶车队、家庭服务机器人等场景的日渐成熟,Multi-Agent Embodied AI 的研究正迎来前所未有的发展机遇。
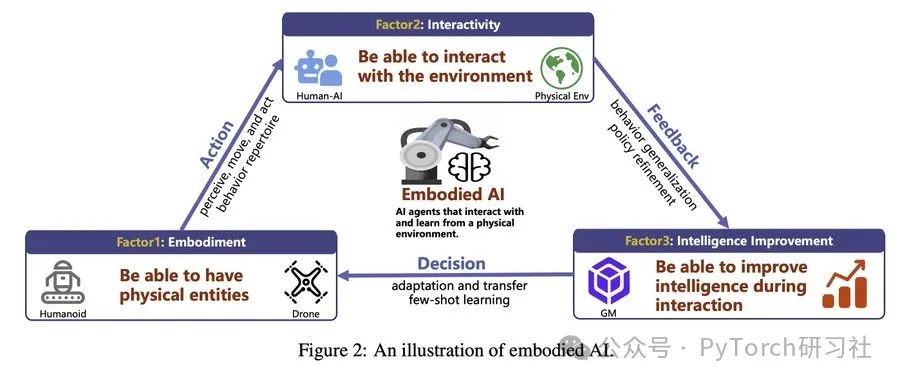
🔍 Embodied AI 的三大核心支柱
文章指出,Embodied AI(具身智能)之所以独特,核心在于三个方面:
1. Embodiment(具身性):拥有一个物理身体,在物理世界中感知与行动;
2. Interactivity(交互性):与环境持续互动,而非仅在静态数据上推理;
3. Adaptation(适应性):通过经验持续学习、改进与演化。
这三大支柱共同构建出一个可以真正“行动在世界中”的智能体。而多智能体的研究正是对这一结构的扩展和深化。
🤝 多智能体 Embodied AI:协作的新范式
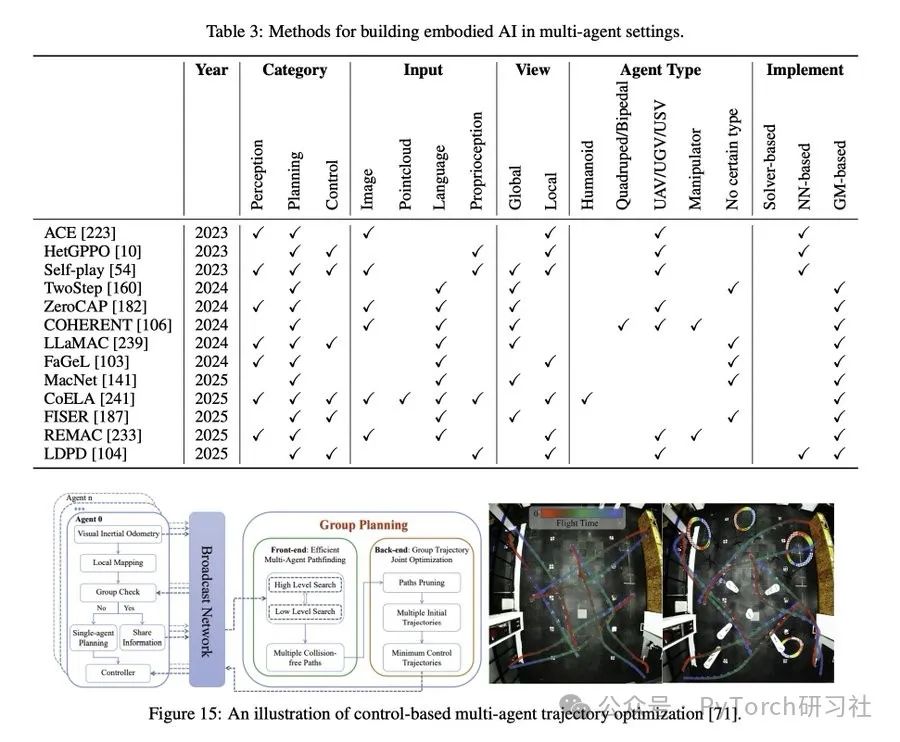
多智能体具身智能部分系统性地探讨了多个物理智能体在动态环境中协作的方式,其主要研究方向包括:
-
基于控制的策略:如任务分配、集体路径规划;
-
基于学习的方法:应对异步、异质智能体的协作难题;
-
生成式模型(Generative Models)的引入:LLMs 等模型正在帮助智能体完成协作规划、自然语言沟通,甚至更自然的人机协作;
文中还强调了任务分配、去中心化决策、真实世界协调能力等研究热点,尤其提出构建可扩展学习机制与鲁棒的多智能体评估基准是该领域发展的瓶颈与突破口。
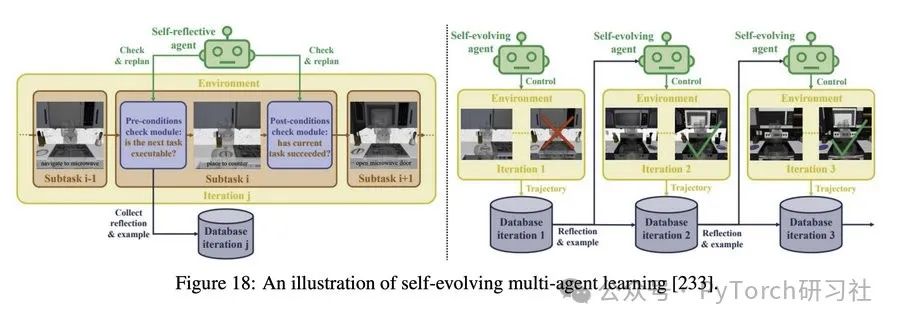
♻️ 自进化的多智能体系统:让智能体“自己成长”
一个特别有趣的板块是关于自进化学习(Self-Evolving Multi-Agent Learning)的讨论。
传统智能体常依赖静态策略和结构,但真实世界是不断变化的:任务可能不同、协作者可能更替、甚至目标也在演化。
为此,研究者提出了一系列机制来让智能体系统“自我成长”:
-
自我博弈(Self-play)
-
策略进化(Policy Evolution)
-
可扩展架构(如 Transformer、图神经网络)
这样的系统可以适应动态团队规模、历史经验迁移,并理解新协作者或对手的行为,从而达到更鲁棒的长期协作能力。
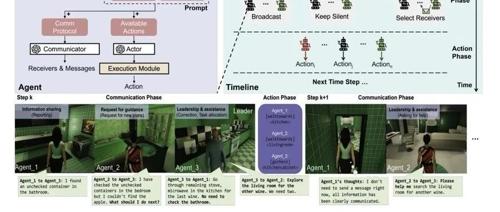
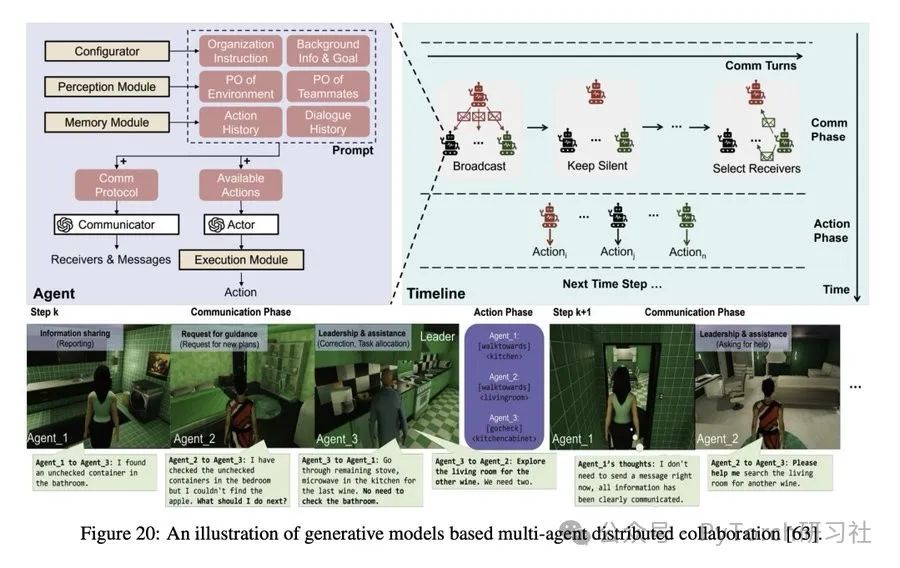
🧠 分布式决策与人机协作的新可能
文章最后深入探讨了如何实现去中心化的智能体协作,其中提到了生成式模型在该领域的潜力:
每个智能体拥有自己的生成式模型,能独立进行感知、决策、信息补全,并与其他智能体高效沟通,最终实现团队目标的协同推进。
此外,论文也展望了人类与智能体长期协作(Human-AI Collaboration)的路径——这是迈向更可信任、更实用的AI系统不可或缺的一环。
https://arxiv.org/abs/2505.05108加入星球获取提示工程、RAG和Agent开发实践教程。

(文:PyTorch研习社)