
谷歌让机器人「长脑子」了!首发离线具身VLA模型,断网精准操控

谷歌发布Gemini Robotics On-Device模型,实现VLA多模态大模型在具身机器人本地离线运行。此模型无需网络即可稳定运行,适用于延迟敏感的应用场景,展示了强大的视觉、语义和行为泛化能力。
谷歌发布Gemini Robotics On-Device模型,实现VLA多模态大模型在具身机器人本地离线运行。此模型无需网络即可稳定运行,适用于延迟敏感的应用场景,展示了强大的视觉、语义和行为泛化能力。
Google DeepMind 推出的 Gemini Robotics On-Device 是一款专为双臂机器人设计的大模型,能够在本地运行并理解人类指令,流畅执行任务。它具有强大的泛化能力和较快的学习速度,且适用于多种机器人平台和场景。

谷歌发布Gemini Robotics On-Device模型,实现机器人本地化处理高精度任务和快速学习。该模型基于视觉-语言-动作(VLA)架构,在本地硬件上运行,无需云端支持,大幅提高响应速度和安全性。这标志着机器人从依赖云端的远程操控迈向自主决策的新阶段。

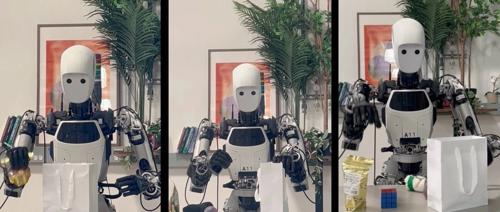
谷歌推出首个设备机器人模型Gemini Robotics On-Device,该模型可本地运行并实现低延迟推理,支持灵巧操作任务,如拉开袋子、叠衣服等,并且是可供微调的VLA模型。