

具身智能是人工智能走向实际应用很关键的产品形态了,也是硅谷巨头们拼劲全力要争夺的下一张技术船票,因为它是物理世界的自主智能体。
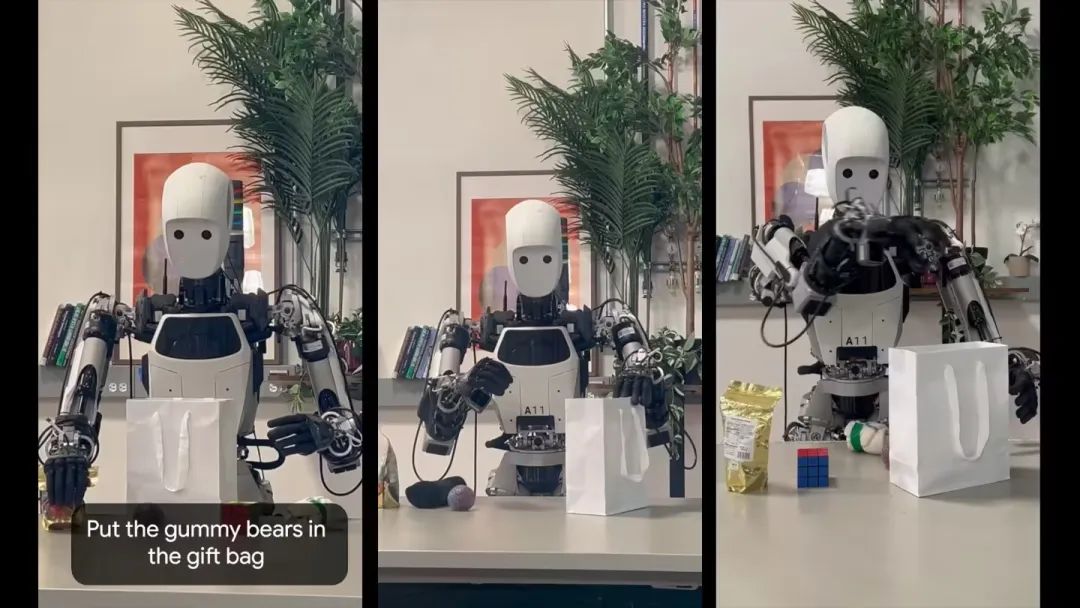
近日,谷歌 DeepMind 实验室宣布推出全新的“Gemini Robotics On-Device”模型,这一创新让机器人彻底摆脱了对网络的依赖,实现了本地化的智能决策。在工程师的现场演示中,双手机器人灵巧地完成了解开旅行包拉链以及将皱巴巴的 T 恤叠成整齐方块的任务。面对工业传送带上从未见过的零件,搭载该模型的 Franka 双臂机器人依然能够精准完成装配任务。个人觉得它标志着机器人从依赖云端的“远程操控”,迈向了自主决策的跨越式转变。
⋯ ⋯
谷歌此次发布的 Gemini Robotics On-Device 模型,在机器人智能化的道路上实现了三重突破。
离线高精度操作成为最大亮点,该模型基于视觉 – 语言 – 动作(VLA)架构,完全在机器人本地硬件上运行,无需云端支持,彻底消除了网络延迟对机器人响应速度的限制。
在执行解开背包拉链、叠衣服甚至系鞋带等高精度任务时,毫秒级的延迟都会导致任务失败,而本地化处理确保了机器人动作的实时性和可靠性。
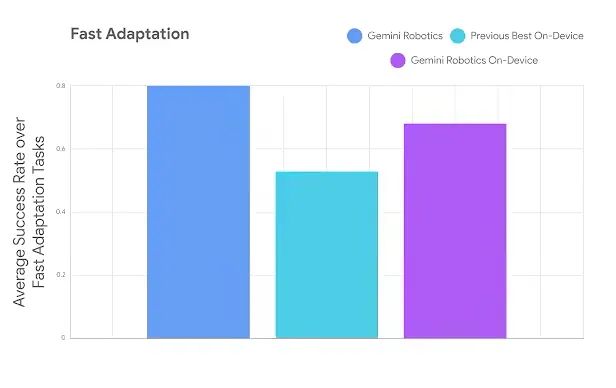
快速学习能力同样引人注目,通过配套发布的 Gemini Robotics SDK,开发者只需在 MuJoCo 物理模拟器中展示 50 到 100 次任务演示,机器人就能掌握新技能。
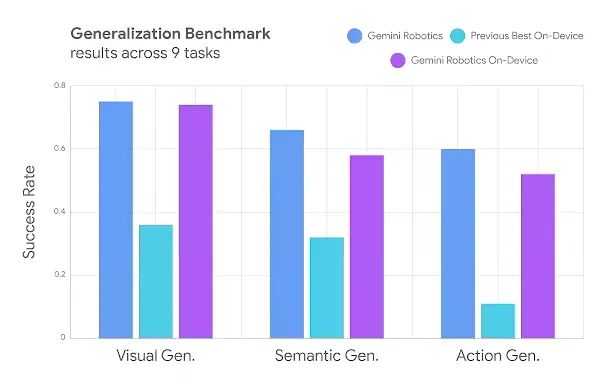
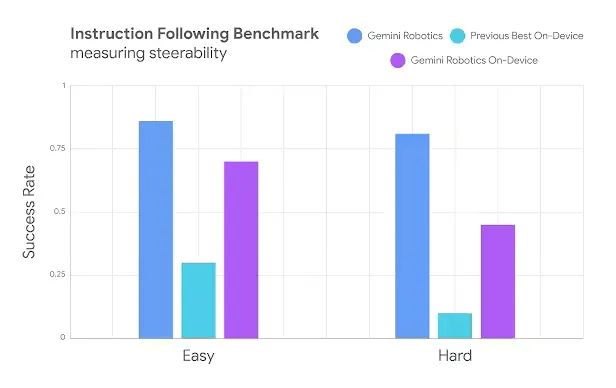
“小样本学习”能力大幅降低了机器人技能更新门槛,项目负责人 Carolina Parada 强调:“我们的模型能够快速适应新任务,仅需少量演示就能将基础知识泛化到新场景中”。
安全与泛化构成第三大支柱,模型通过 Live API 实施语义安全检测,底层安全控制器实时管理动作力度与速度。在工业传送带测试中,Franka FR3 双臂机器人成功处理了从未训练过的物体和场景,展示了强大的零样本泛化能力。
⋯ ⋯
谷歌此次技术路线调整,实则是对机器人智能架构的根本性重构。
传统云端依赖模式面临物理世界互动的固有限制,机器人需要抓取坠落物体或躲避突然出现的障碍物时,将视觉数据发送到云端处理再传回指令造成的延迟,会导致灾难性后果。
DeepMind 团队清醒地认识到,在物理世界运行的机器人,响应速度关乎成败,行业正形成“本地 – 云端”的战略分歧。
微软的 Magma AI 深度整合 Azure 云平台,瞄准企业自动化场景,而谷歌与 Figure AI 则选择嵌入式 GPU 本地处理路线。
Figure AI 推出的 Helix AI 模型,同样完全运行在机器人本地硬件上,战略的分化也反映了科技巨头对未来机器人智能架构的不同判断。
隐私考量加速了本地化趋势,家用机器人能观察家庭环境、理解人类生活习惯并记忆个人偏好时,数据留在设备本地成为关键的信任基础。
谷歌进行转变并非偶然,从 3 月发布云端混合架构,到如今的纯本地方案,体现了对物理 AI 核心需求的重新认识。
⋯ ⋯
机器人基础模型的竞争已进入白热化阶段,全球创新力量纷纷布局。
中国研究团队展现了强大的创新力,北京大学与智元机器人联合推出的 OmniManip 架构,通过双闭环系统设计解决了机器人高精度操作难题。
复旦大学与上海交通大学发布 LoHoVLA 模型,创新性地统一了长时序任务的高层规划与底层控制。而去年 12 月出现的 π0 模型,结合预训练视觉语言模型与流匹配技术,实现了 50Hz 的高频动作控制,突破了灵巧操作瓶颈。
产业资本也在加速入场,去年工业人形机器人领域风险投资激增三倍,达到 12 亿美元。国际机器人联合会数据显示,工业机器人安装量已达 165 亿美元的历史峰值,“物理 AI”成为年度关键词。
科技巨头战略各异,英伟达构建人形机器人底层模型 GR00T,Hugging Face 开发开源机器人模型和数据集,韩国初创公司 RLWRLD 在 Mirae Asset 支持下攻关基础模型。
(一)离线智能的突破正在重构机器人应用场景的价值链,在半导体洁净室、手术室等网络敏感环境中,谷歌的离线方案解决了关键痛点。汽车制造商已嗅到机遇,智元机器人获得北汽、上汽和比亚迪等多家车企投资,估值超 70 亿元,为工业场景落地铺路。
(二)家庭服务机器人迎来曙光,本地化处理保障了家庭隐私安全,使机器人家用成为可能。想象机器人离线完成照料老人、看护儿童等敏感任务,数据不出家门,这将极大缓解用户对隐私泄露的担忧。
(三)灾难响应与野外作业场景价值凸显,地震救灾、矿山勘探等网络不稳定环境,正是离线机器人的天然舞台,谷歌展示的零样本泛化能力让机器人在陌生环境中自主决策成为现实。
开发者生态成为竞争焦点,谷歌通过“可信测试计划”限量开放 Gemini Robotics SDK,意在培育早期生态。能否吸引足够开发者,将决定技术迭代速度。初创公司如 Hugging Face 以开放数据集策略另辟蹊径,争夺开发者心智。
⋯ ⋯
离线机器人仍面临严峻挑战,因为计算能力天花板是无法回避的。本地硬件有限的计算资源,注定无法与谷歌庞大的云端基础设施匹敌。
最复杂的任务仍需云端支持,混合架构仍是中期方案。
长时序任务规划能力存疑,虽然复旦大学的 LoHoVLA 在模拟测试中表现出色,但真实世界的长链条任务。如“整理厨房”涉及餐具清洗、食物储存、台面清洁等多步骤协调,仍是当前模型的薄弱环节。
硬件成本制约普及,支持本地智能的高性能嵌入式硬件显著推高机器人成本。智元机器人量产千台通用具身机器人的成果令人振奋,但距离成本敏感的家用市场仍有距离。
安全认证体系缺失,当机器人获得自主决策权,如何确保其行为绝对安全?当前语义安全检测框架尚未形成行业标准,监管空白也会延缓商业落地。
谷歌 DeepMind 此次突破,技术哲学角度看是具身智能范式的重大跃迁。智能体不再满足于理解世界,开始追求在物理世界中自主行动。机器人能处理未知物体、适应陌生环境时,通用机器人的雏形已经初现了。
产业生态将迎来洗牌,传统依赖专用系统的工业自动化厂商面临颠覆,“基础模型 + 领域适配”的新模式正在形成。开发者用 100 次演示定制机器人技能的能力,将大幅降低自动化门槛。
人机关系面临重构,机器人获得本地决策能力,人类将从操作员转变为目标制定者与监督者,对于劳动力市场的影响不亚于当年的工业自动化革命。
全球创新格局悄然变化,中美欧研究团队同期突破表明,物理 AI 已成为全球科技竞争新高地。中国团队在 OmniManip、LoHoVLA 等架构的创新,展现了东方智慧的独特贡献。
工业机器人安装市场已达 165 亿美元,而具身智能的突破才刚刚开始。当谷歌的机器人灵巧地折叠衣物时,英伟达的工程师正在优化 GR00T 人形模型。当北大团队完善 OmniManip 架构时,韩国初创公司 RLWRLD 正为其基础模型注入新算法。
不积硅步,无以至千里。竞赛的终点不是技术霸权,而是物理世界与数字智能的深度融合。离线机器人走向自主进化的那一刻,人类的生产方式、生活方式乃至文明形态,都将经历一场静默而深刻的变革。

(文:陳寳)