统一框架下的具身多模态推理:自变量机器人让AI放下海德格尔的锤子

文章讨论了自变量机器人如何通过统一模态架构,实现具身多模态推理能力。该架构消除视觉、语言和行动之间的人为边界,并采用生成模型进行跨模态学习,最终让机器人具备符号-空间推理、物理空间推理及自主探索与协作的能力,接近人类的直觉操作方式。
文章讨论了自变量机器人如何通过统一模态架构,实现具身多模态推理能力。该架构消除视觉、语言和行动之间的人为边界,并采用生成模型进行跨模态学习,最终让机器人具备符号-空间推理、物理空间推理及自主探索与协作的能力,接近人类的直觉操作方式。

清华大学陈键飞团队提出SageAttention3,实现了5倍于FlashAttention的推理加速。此模型在多种视频和图像生成等大模型上保持了端到端的精度表现,并首次提出了可训练的8比特注意力用于大模型的训练加速。
、广东省农业科学院、巴西圣保罗大学、英国罗莎琳德富兰克林医科大学、瑞典于默奥大学的研究团队等科研机构

Google发布了Gemini 2.5系列的新版本,包括稳定版和预览版。其中Gemini 2.5 Flash-Lite是性价比最高的模型之一,适用于需要快速处理大量任务的应用场景。
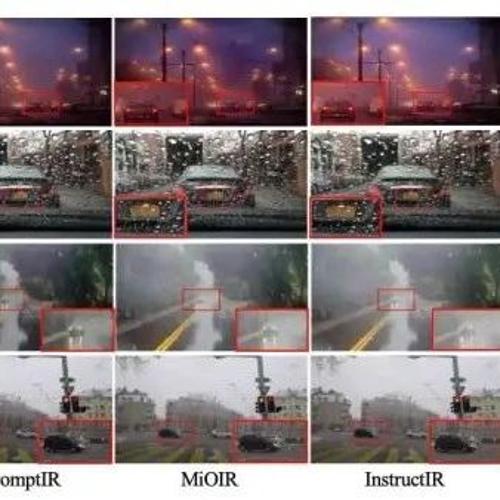
arvisIR 是首个将视觉语言模型(VLM)作为控制器的智能图像恢复系统,通过动态调度多个专家模型