
 机器人大讲堂
机器人大讲堂


牧原或是最大的养猪机器人企业

牧原股份等企业利用机器人自动化提升养猪效率。牧原集团研发出多种智能机器人用于清粪、推粪、驱赶牲畜、搬运等操作,实现智能化管理。2023年,牧原有1200余名研发人员,研发投入达10亿元。
2024年总销量6536台,98%显著增长,这家企业怎么做到的?

法奥机器人凭借技术驱动的核心竞争力、成本控制优化策略以及新场景探索,推动了协作机器人的广泛部署。通过全产业链布局和开放兼容生态系统建设,拓展应用场景,实现总出货量大幅增长。

哈工大教授创业!伺服驱动技术研发商「西恩科技」天使+轮获数千万融资!

哈尔滨西恩科技有限公司宣布完成数千万元天使+轮融资,经纬创投独家投资。公司致力于高端伺服驱动技术创新研发,并已获得多项专利和授权。核心团队由杨明教授领衔,拥有丰富的科研与实践经验。西恩科技在工业机器人、医疗机器人等领域取得显著成果并广泛应用于多个行业。
登上央视!七腾机器人斩获“2024新质生产力年度案例”桂冠!全新防爆四足机器人X3 stable重磅亮相!

1月20日,中央广播电视总台“2024新质生产力年度盛典”在央视二套财经频道播出,其中
七腾机器人有
北理工团队借鉴蝗虫跃翔一体特性 研制出具备陆空跨域能力的微小型仿生机器人
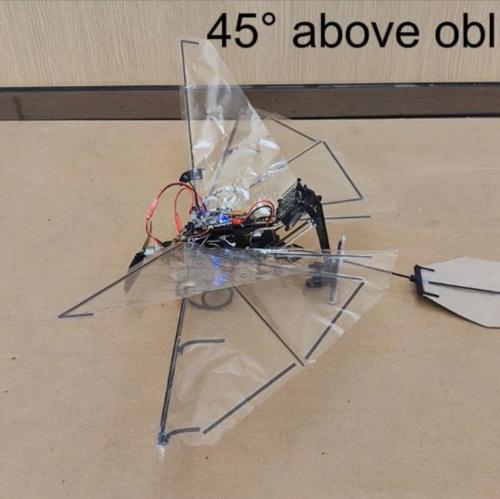
北京理工大学石青教授团队研发出一款模仿蝗虫多模态运动的机器人(LocustBot),融合爬行、跳跃和滑翔三种运动模式。通过单一丝杠电机实现腿足伸展与翼形折叠,结合TD3强化学习算法优化跳跃-滑翔动作策略,在野外环境中展示了良好的适应性和能量利用效率。

