
 机器人大讲堂
机器人大讲堂
Science Robotics顶刊发表 冲绳科学技术研究所揭秘机器人语言行为组合性发展机制

组合性是实现机器人语言能力泛化的关键。研究团队提出了一种基于自由能原理的神经网络模型,该模型允许研究人员访问内部状态,并通过视觉-本体感觉序列和语言整合促进儿童般的概括能力。

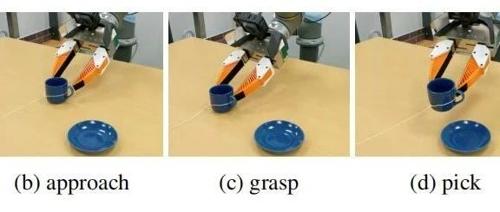
中国科大成功研发19自由度仿生灵巧手,复现人手级运动能力!

中国科学技术大学张世武教授团队研发出一种具备19自由度的轻质仿生灵巧手,重量仅为0.37千克,能够复现人手级别的功能,适用于上肢截肢患者的手部功能重建与日常生活辅助。

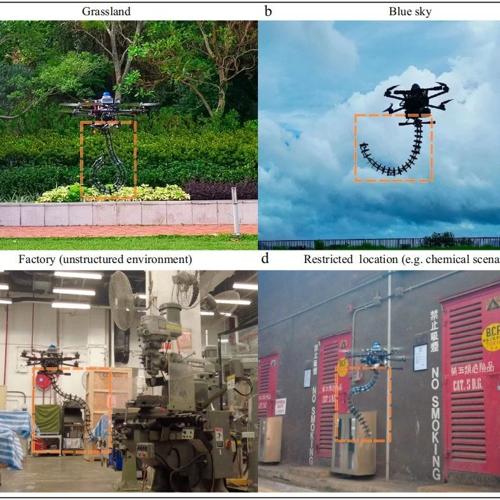
Science Robotics发表 新加坡科技设计大学研发iFL3DP技术 解决软机器人维修和升级难题
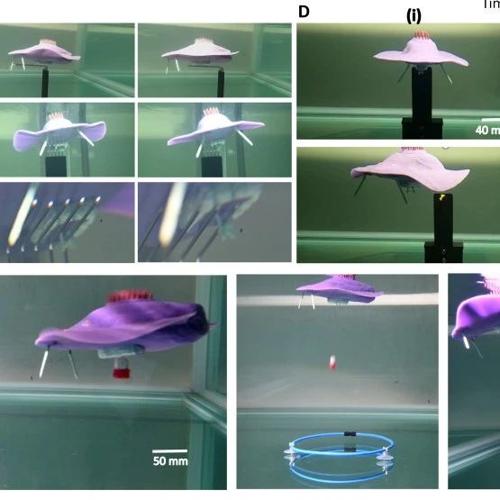
在过去的数十年间,机器人系统领域经历了迅猛的发展,不断涌现出更为先进的电子设备、机械组件以及软件解决
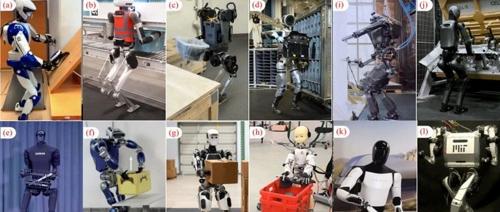
Unitree H1:我今年一岁半,成为央视蛇年春晚整场最靓“显眼包”

人形机器人H1在2024年蛇年春晚大放异彩,展示了多项新技术。从一岁半开始学习行走、跑步和跳跃,最终在除夕夜与观众见面,成功点燃了东北秧歌的热情。