
攀缘而上,万物皆可登临 – Science子刊封面(Science主页推荐):攀爬植物启发攀爬机器人

面,特别是非连续表面的攀爬机器人
,
一直是该领域的重大挑战。近期,
浙江大学机械工程学院邹俊课题组
面,特别是非连续表面的攀爬机器人
,
一直是该领域的重大挑战。近期,
浙江大学机械工程学院邹俊课题组
张江举行的人形机器人表演周进入第五天,展示了傅利叶GRx系列人形机器人的灵活性和智能性。该系列机器人高度仿生,拥有多种自由度和先进的执行器系统,已在多个领域实现实验性应用。活动旨在推动技术共享与生态共建,未来将带来更多进阶数据模块以提升性能稳定性。

研究团队开发出四足机器人PAWS,仅用4个电机控制12个关节实现接近生物的自然运动。通过模仿生物协同特性,PAWS展示了惊人的环境适应能力,并揭示了机器设计的新思路。

本次大赛设置创新型与应用型双赛道。其中,创新型赛道包括机器人自主抓取挑战、AI双臂机器人技能挑战和移动机械臂复合机器人挑战;应用型赛道则以埃斯顿通用机器人实训工作台上的实际操作为主。

张江举办人形机器人表演周,上海智元新创技术有限公司展示了其大模型GO-1在多个真实应用场景中的表现。该模型基于创新的ViLLA架构,能够结合互联网视频和人类示范学习,提高具身智能的应用门槛。

教授和
洪堡学者
孟齐志博士在
SmartBot
杂志上发表了题为
Motion-Force Int
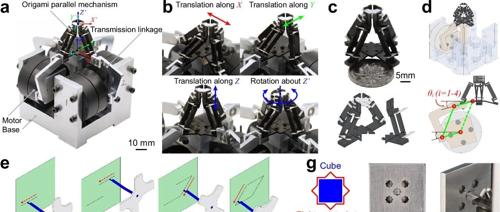
细处理的微操作技术被广泛应用。但传统微操作机器人多为金属材质由电机或压电陶瓷驱动,虽精度高但体积大且

张江人形机器人演示周第三天,开普勒先行者K2展示了其在物流仓储场景中的搬运技能。作为一款通用人形机器人,它具有30公斤的负载能力、灵活的手部操作和8小时连续作业时间。该机器人的成功研发体现了行业洞察和技术积累,已经在多个领域应用测试,并有望在未来拓展至家庭服务领域。

