
Information Fusion 综述论文:基于视触觉传感器的触觉数据生成与应用
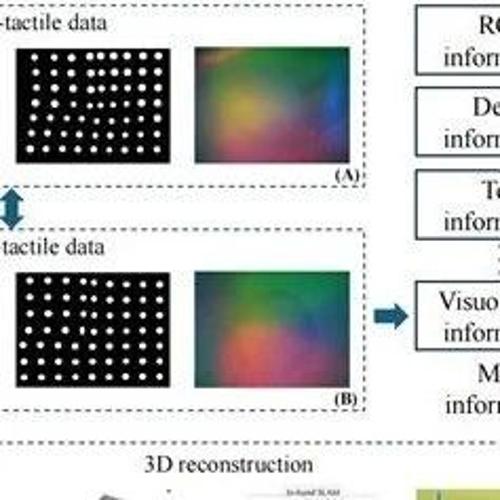
多模态数据集中的视触觉传感器综述论文总结了视触觉信息的生成方法及其应用。文章介绍了基于物理和学习的技术,涵盖了弹性体模拟、光学模拟、标记物运动模拟及跨模态与真实迁移生成方法,并提出标准化评价规则。
多模态数据集中的视触觉传感器综述论文总结了视触觉信息的生成方法及其应用。文章介绍了基于物理和学习的技术,涵盖了弹性体模拟、光学模拟、标记物运动模拟及跨模态与真实迁移生成方法,并提出标准化评价规则。

西湖大学的仿生潜水器‘西谷II号’完成深海海试,实现四项技术验证;上虞区成立杭州湾具身智能创新中心推动该领域发展;北京大学研发新模型简化人类角色动作生成;宾夕法尼亚州立大学开发微型柔性机器人用于医疗和救援任务;加州大学研发的卷尺启发机器人夹持器可用于水果采摘等应用。

4月16日,戴盟发布多维高分辨率视触觉传感器DM-Tac W、类人手部执行器DM-Hand1和穿戴式数据采集系统DM-EXton系列家族产品,贯通机器人感知、操作和学习技术核心。该方案攻克触觉感知难题,助力具身智能产业加速商业化落地。
大会于北京中关村国家自主创新示范区展示中心隆重召开。
本次大会集结了
45家人形机器人与具身智能头部

众擎机器人宣布其人形机器人PM01和SA01正式量产上市,预计2025年人形机器人市场规模将达全球82.39亿元。公司成立于2023年,拥有深厚的技术背景及创业经历,近期完成新一轮Pre-A轮融资。

苏州灵猴机器人引入新股东智元机器人;商汤发布大模型提升人机交互体验;亮道智能推出激光雷达助力精准感知;多伦多大学与意大利团队提出自主通才科学家概念;麻省理工开发跳跃微型机器人跨越障碍节能;埃斯顿自动化等企业关注工业服务特种医疗人形具身智能核心零部件教育机器人等多领域。

第二届中国人形机器人与具身智能产业大会召开,聚焦技术突破、场景落地与产业协同。预计到2030年,人形机器人的产量将超万台,市场规模达到1037.52亿元,带动相关市场规模增长显著。专家预测我国正从实验室阶段迈向量产应用阶段,为推动智能化转型提供关键力量。

建的关键力量。
随着人工智能、传感器技术、材料科学等多领域的交叉融合,人形机器人不仅在形态上日益逼近
韩国成立’K-人形机器人联盟’以提升全球地位;哈工大推出《智能机器人》期刊;重庆山地茶采摘机器人投产解决用工短缺问题;阿根廷引入中国围棋机器人促进文化交流;首程资本投资云鲸智能加速家用机器人产业升级。
