
极市导读
中科大团队提出 DualReal,在 DiT 架构中用双域感知适配模块与阶段融合控制器,实现身份与运动的自适应联合训练,仅需短时微调即可在保持高保真身份的同时生成流畅运动,在 CLIP-I 和 DINO-I 两项指标上平均分别提升了 21.7% 和 31.8%。 >>加入极市CV技术交流群,走在计算机视觉的最前沿


论文链接:https://arxiv.org/abs/2505.02192
项目主页链接:https://wenc-k.github.io/dualreal-customization/
开源代码链接:https://github.com/wenc-k/DualReal
视频概览
摘要
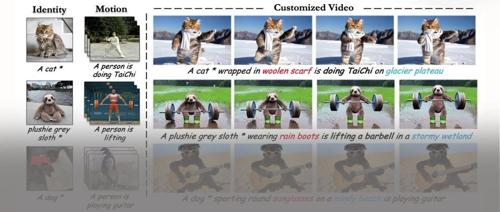
传统双模式的视频定制方法通常沿用“孤立定制”范式,即仅对主体身份或运动动态单一维度进行定制,忽视了身份与运动之间的内在约束与协同依赖,导致在生成过程中二者不断冲突并系统性地退化。中科大团队提出了 DualReal,一种通过自适应联合训练协同构建多维依赖的新框架。
双域感知适配模块 动态切换当前训练阶段(身份或运动),利用冻结维度的先验信息指导另一个模式的学习,并通过正则化策略防止知识泄漏;阶段融合控制器基于不同的去噪阶段和DiT网络深度,为各模式分配自适应的粒度控制,避免在不同阶段出现冲突,从而实现身份与运动模式的无损融合。
构建了一个比现有方法更全面的评估基准。实验结果表明,DualReal 在 CLIP‑I 和 DINO‑I 两项指标上平均分别提升了 21.7% 和 31.8%,并在几乎所有运动质量指标上均取得了最佳表现。
动机
传统视频定制化生成多聚焦于“身份驱动”或“运动驱动”单一维度,忽略两者的内在约束与协同依赖,导致对某一模式过拟合时而带来的一致性退化问题,如下图所示:

-
固定身份定制,并逐步增加运动训练步数(红框代表最佳身份一致性)。 -
实验结果:运动先验会不可逆地损害身份一致性;针对不同身份,无法找到统一的运动训练程度来最小化身份退化。
同时,DiT 模型在不同去噪阶段和不同深度的网络层,对身份与运动特征的关注焦点时刻发生变化,如何动态协调身份与运动特征的比例,以实现高质量模式定制:

-
随着去噪程度加深,模型越来越重视身份学习(橙色虚线)。 -
在 DiT 最深的网络层组,趋势相反:随着去噪深入,模型更侧重于运动建模(红色实线)。
方法
双域感知适配模块
为了在解决维度冲突的同时实现身份和动作的联合训练,我们创新性地提出了双域感知适配模块。该方法利用一个模式的先验来引导另一个模式的训练,同时通过正则化策略防止信息泄漏,如下图所示:

联合身份-运动优化
与其余微调整个扩散模型的方法不同,DualReal 首先在每次去噪迭代前以预定义的比率动态切换训练模式(即侧重于动作或侧重于身份),然后将相应的数据送入DiT网络。第个块的输入是联合特征: ,其中分别表示文本和视觉token的数量。适配器采用具有跳跃连接的瓶颈架构:
其中激活函数 对应GELU,和 分别表示身份和动作线性投影权重,均作用于隐藏维度 上。权重 是条件线性映射,将参考图像嵌入映射到潜在空间。
通过阶段融合控制器的约束,动作适配器输出由权重系数 缩放,身份输出由互补系数 加权。调制后的特征通过残差连接聚合到DiT块的输出中。上述过程可表述为:
其中 表示第层DiT的输出,表示最终块的聚合输出。这种参数约束在网络块和去噪阶段之间平衡了特征贡献,同时在结构上强制适配器在适应过程中分别关注身份主体或动作动态。
正则化策略
在联合训练中,一个关键挑战在于主体身份与运动动态特征之间显著的分布偏移。正如先前工作所观察到的那样,如果不加约束地优化,通常会导致跨模式知识的破坏性干扰。例如用静态图像微调动作适配器,会不可逆转地降低其动态生成能力,反之亦然。为了解决这个问题,我们使用梯度掩码进行正则化,仅激活对应适配器的参数。具体而言,基于二元选择变量 (用于优化动作连贯性或保持身份一致性),我们可以将其公式化为:
其中,损失函数表示视频扩散重建损失。适配器参数被划分为动作部分 和身份部分,分别由二元掩码 和 控制。
我们在正向传播过程中,保持一个冻结的适配器处于待命状态,以告知当前适配器的模式种类,从而在数据流中实现跨模式特征参考。而来自冻结适配器的特征可以作为内在正则化,约束维度过拟合,从而促进相互参考学习,不产生干扰和损害。
阶段融合控制器
为了解决不同处理阶段的维度竞争问题,我们提出了阶段融合控制器。
该控制器通过对缩放系数进行时间感知,使双域感知适配模块能够根据下图所示的机制自适应地分配特定模式的权重,以此实现粒度解耦。

具体来说,阶段融合控制器根据去噪时间步和融合的文本-视觉特征,动态生成多组针对不同DiT深度层的缩放权重。
对于输入特征,首先通过池化提取关键特征,然后参考时间步嵌入 ,使用LayerNorm进行自适应调制。这一操作可以表述为:
其中 是权重矩阵, 是时间步嵌入的通道维度, 定义为:
计算得到的权重系数随后被集成,以实现基于时间步和视觉文本token之间的门控融合,如下所示:
通过对基于DiT的去噪架构的经验分析,我们观察到更深的块本质上擅长处理具体的细粒度特征。为了增强层次解耦,我们实现了一个向下传播的MLP,将集成特征转换为权重组,形式化如下:
其中 是投影算子:。这里表示DiT块的深度, 指定解耦权重组的数量;每个组然后通过参数分配依次控制其指定的层。
实验
实验设置
-
评估数据集:
-
对于身份定制,我们严格从先前工作和互联网平台(包括宠物、毛绒玩具等)中选择了50个主体,每个主体包含3–10张图像。 -
对于动作定制,我们从公共数据集中收集了21个具有挑战性动态模式的动作序列。 -
此外,每个案例提供了50个不同的提示词(包含不同的修饰或环境),以评估方法的可编辑性和场景多样性。 -
基线方法:在现有方法中,DreamVideo能够同时定制身份和动作。为了公平比较,我们在相同的DiT骨干上实现了两种方法:(1)CogVideoX-5B:按照DreamBooth范式先对身份数据、再对动作数据进行全参数顺序微调;(2)LoRA微调:分别训练两个LoRA模块用于身份和动作,然后在推理时融合其参数。此外,MotionBooth的身份模块在训练过程中引入了无关的随机视频以保留模型的动作能力,因此我们也将其与我们的方法进行比较。
-
评估指标:使用了三个维度的七项指标。
-
文本-视频一致性:通过CLIP-T分数衡量,计算为文本提示与所有生成帧之间的CLIP余弦相似度。 -
身份保真度:使用DINO-I和CLIP-I分数量化,分别通过DINO ViT-S/16和增强的CLIP嵌入评估生成帧与参考身份图像之间的特征相似度。 -
时间动作质量:使用四项指标评估,包括T-Cons用于时间一致性,Motion Smoothness(MS)用于整体流畅度,Temporal Flickering(TF)用于相邻帧之间的高频不一致性(通过平均绝对差衡量),以及Dynamic Degree(DD)利用RAFT光流估计来量化动作强度(我们计算方法相对于基准的偏差,来确定动作强度的一致性)。MS、TF和DD均来自综合视频基准VBench。
主要结果
-
定性结果:下图中的定性实验表明,虽然MotionBooth保持了身份保真度,但它无法有效建模动作模式;DreamVideo在推理过程中因模式冲突而导致身份不一致;CogVideoX-5B和LoRA由于其解耦的训练方法,也难以保持身份。相比之下,DualReal 实现了高身份一致性和连贯的动作,展示了联合训练在平衡模式冲突方面的优势。

-
定量结果:如下表所示,DualReal 在CLIP-I和DINO-I指标上平均提高了21.7%和31.8%,在三项动作质量指标(T-Cons、Motion Smoothness和Temporal Flickering)上取得了最佳结果,并在CLIP-T上排名第二;我们评估了所有动作数据,计算其平均DD为12.02。我们的指标与之略有偏差,证明动作幅度没有失真。总体而言,我们的方法在保持文本一致性的同时,显著增强了动作连贯性和身份保真度,进一步验证了我们的自适应联合训练方法。

(文:极市干货)