

东京大学的实验室里,一根覆盖着淡黄色皮肤的机器人手指正在缓缓弯曲。这不是硅胶,不是乳胶,而是真正的活体人类皮肤组织。更神奇的是,这层皮肤内部还有一套“血管系统”在源源不断地输送营养液。
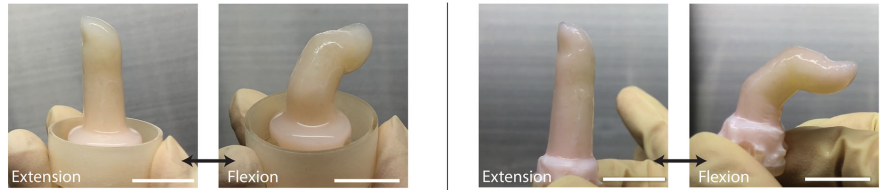
7天过去了,暴露在空气中的皮肤依然保持着湿润和活性。要知道,此前所有的活体皮肤机器人实验中,皮肤组织在空气中几个小时就会干燥死亡。
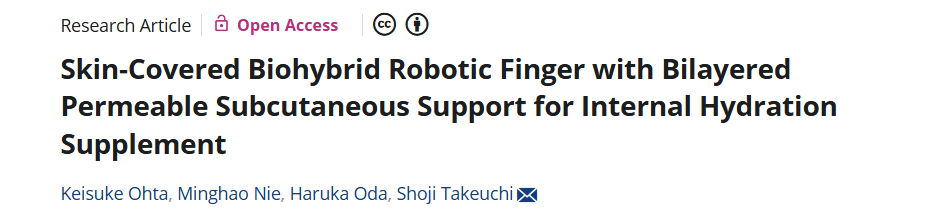
这是不久前发表在《Advanced Intelligent Systems》期刊上的研究。研究团队通过模仿人体的血液循环系统,为机器人皮肤设计了一套双层渗透性皮下支撑结构,成功解决了活体组织机器人最大的技术难题——如何让皮肤在空气中长时间存活。
“就像人体皮肤通过血管获得营养一样,我们的机器人皮肤也能通过内部的循环系统持续获得水分和营养。”研究团队在论文中写道。这或许意味着,科幻电影中那些拥有真实触感的机器人,正在一步步成为现实。
▍双层渗透性皮下支撑:机器人皮肤的“血管系统”
研究团队的核心创新在于设计了一种双层渗透性皮下支撑结构。这个结构由两层组成:一层是密集穿孔的3D打印骨架层,另一层是海绵状的聚乙烯醇(PVA)水凝胶层。
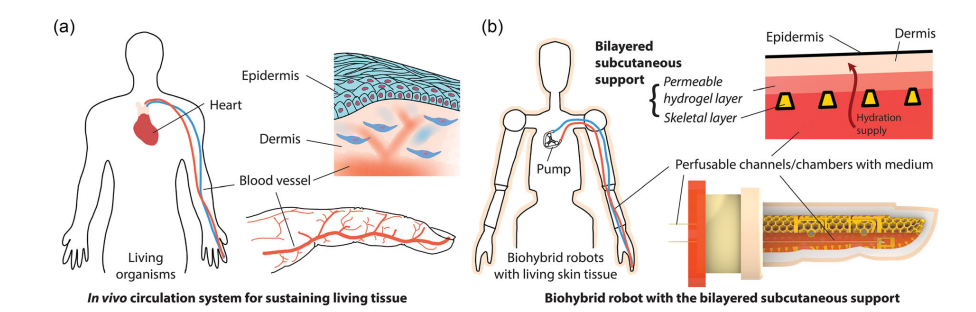
先说骨架层。不同于以往的实心设计,这次的骨架采用了蜂窝状的密集穿孔结构。这些孔洞不仅能让培养液自由流通,还保持了足够的结构强度来支撑关节运动。研究团队使用了抗拉强度达71.5 MPa的3D打印树脂,比之前研究中使用的材料强度提高了近50%。
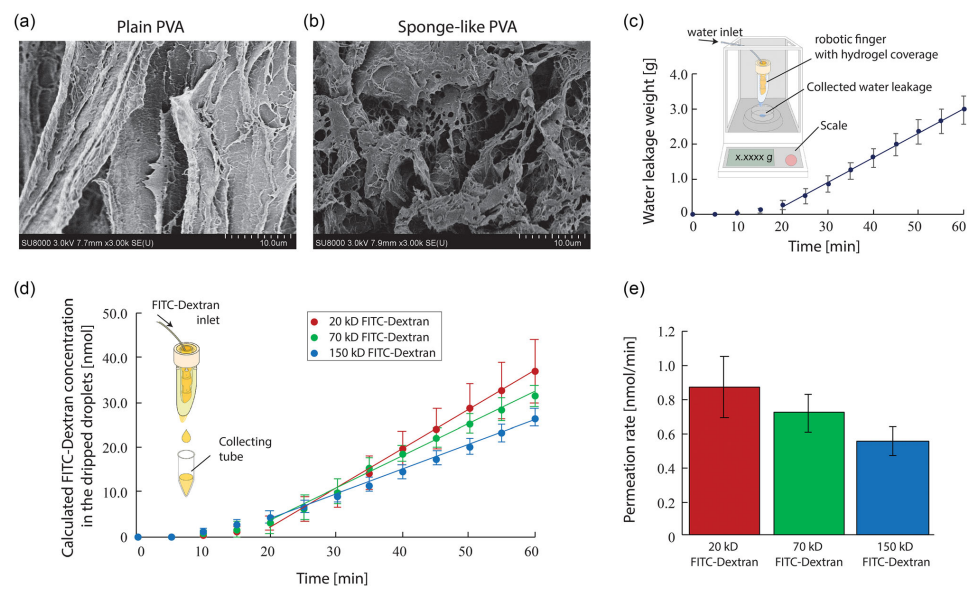
更妙的是水凝胶层的设计。研究人员在制备PVA水凝胶时加入了海藻酸钠,经过冷冻-解冻处理后再将海藻酸钠去除,最终形成了具有海绵状多孔结构的水凝胶。这层水凝胶不仅能够渗透培养液,还能像人体的皮下脂肪一样,为上层的真皮组织提供机械缓冲。
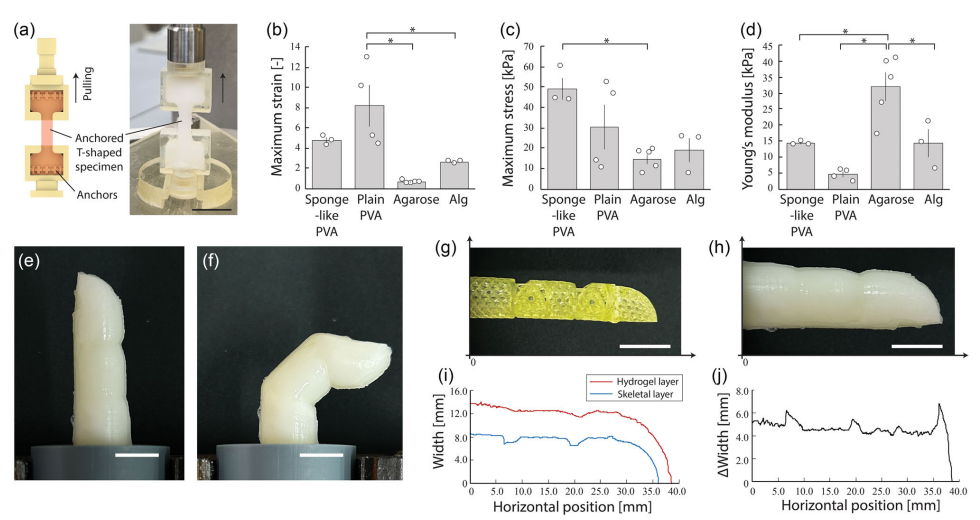
拉伸测试显示,这种海绵状PVA水凝胶的断裂应变达到4.77,远超过关节弯曲所需的0.54应变值,完全能够承受机器人手指的运动。同时,其杨氏模量为14.3 kPa,在柔软性和支撑性之间达到了平衡。
▍注射器驱动的防水关节:让“血液”和运动共存
要让机器人手指既能运动又能内部循环培养液,这本身就是个技术难题。研究团队提出了一个巧妙的“注射器驱动”机制。
具体来说,他们将控制手指运动的尼龙线一端固定在注射器活塞的内侧,线穿过注射器筒体与机器人手指相连。这样一来,通过推拉注射器就能控制手指的弯曲和伸展,而注射器的密封性又很好的解决了防水问题。
实验中,机器人手指在装配水凝胶层后仍能实现45-50度的弯曲角度。虽然比裸露骨架的64度有所降低,但这种程度的活动范围已经足够满足大多数应用需求。
更重要的是,这种设计让培养液能够在手指内部自由流动。渗透性测试表明,海绵状PVA水凝胶能够允许分子量高达150 kD的大分子物质通过,这意味着培养基中的白蛋白(66 kD)甚至纤维蛋白原(260 kD)都能顺利到达皮肤组织。
▍7天空气暴露测试:活体皮肤依然”活着”
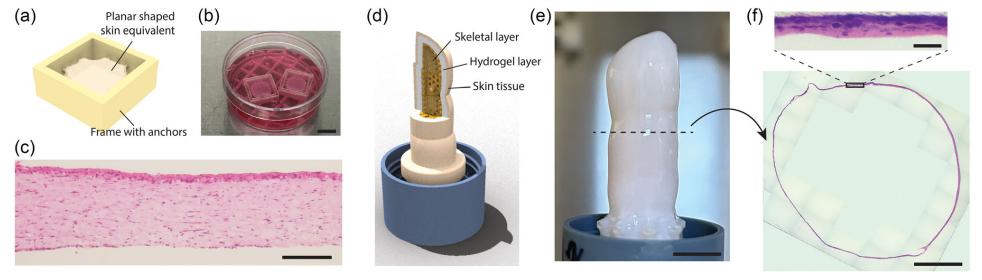
研究还包括是对这种皮肤覆盖机器人手指的实际测试。研究团队使用人类真皮成纤维细胞(NHDF)构建了真皮层,并在其上培养了表皮层。
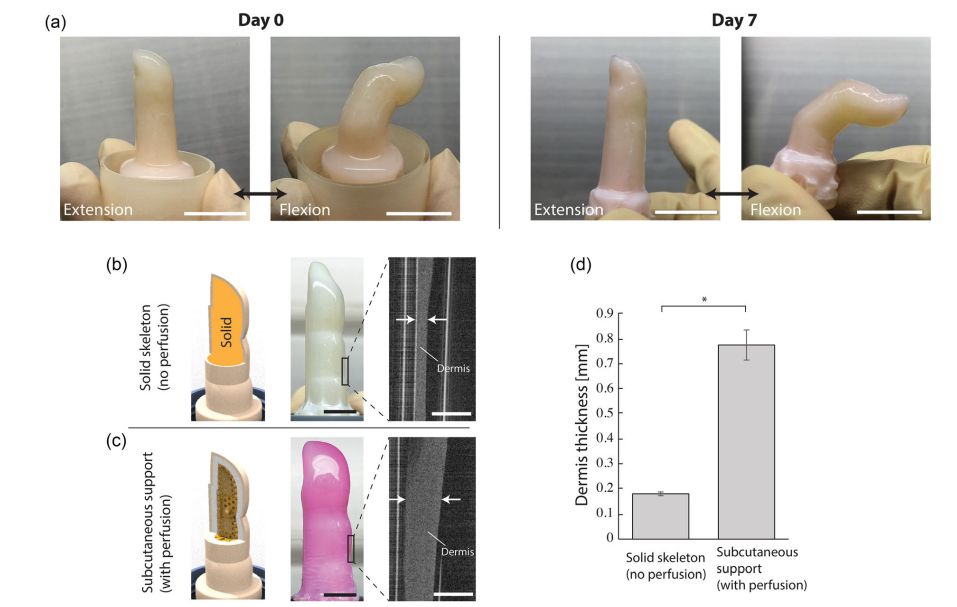
在为期7天的灌注培养中,覆盖在机器人手指上的皮肤组织不仅保持了活性,还表现出了组织收缩的现象——这恰恰证明了细胞的良好活性。更关键的是空气暴露实验的结果。
研究人员对比了两种情况:一种是传统的实心骨架机器人手指,另一种是采用双层渗透性支撑的机器人手指。在空气中暴露一天后,使用光学相干断层扫描(OCT)测量显示,传统设计的真皮厚度降至181微米,而新设计的真皮厚度保持在774微米,是前者的4倍多。
这个差异表明真皮组织的变薄会破坏胶原蛋白网络,改变细胞外环境,最终损害细胞功能。而新设计通过持续的内部补水,有效防止了组织脱水和功能丧失。
实验还发现,传统设计在一天内就有5.5克的水分流失(原始细胞悬液体积为9毫升),这意味着大部分水分通过蒸发和静水压力流失了。而新设计通过海绵状水凝胶的保水能力和持续的内部供给,成功维持了组织的水分平衡。
▍这项技术意味着什么:不只是机器人那么简单
研究团队还计划在皮肤中整合神经、毛囊等更复杂的结构,创造更加逼真的机器人模型。
这项研究的意义远超机器人领域本身。研究团队在论文中提出,这项技术未来可能应用于定制化皮肤移植——根据患者伤口的具体3D形状来培养匹配的皮肤组织,避免传统植皮手术需要从患者身上取皮的痛苦。
在机器人应用方面,具有真实皮肤触感的机器人在医疗护理、陪伴服务等领域将大有可为。试想一下,当护理机器人拥有温暖柔软的触感,对于需要长期照护的患者来说,这种人性化的接触可能带来巨大的心理慰藉。
同时,这种“注射器驱动”的防水设计不仅适用于生物混合机器人,对传统的线驱动机器人也有借鉴意义。而双层支撑结构的设计思路,或将为解决软体机器人的结构与功能矛盾提供新方案。
当然,研究团队也指出了当前的局限性,比如表皮层的厚度和分化程度还需要进一步优化,大面积3D形状组织的细胞活性评估方法仍需建立等。但可以确定的是机器与生命的界限正在变得模糊,技术与生物的融合正在创造全新的可能。
或许在不久的将来,当你握住一只温暖的手时,你需要想一想:这是人类的手,还是拥有活体皮肤的机器人?
参考文献:
Keisuke Ohta, et al. Skin-Covered Biohybrid Robotic Finger with Bilayered Permeable Subcutaneous Support for Internal Hydration Supplement. Advanced Intelligent Systems, 2025.
(文:机器人大讲堂)