ICRA 2025 面向移动抓取的全身控制新范式——让机器人在移动与操控之间动态平衡
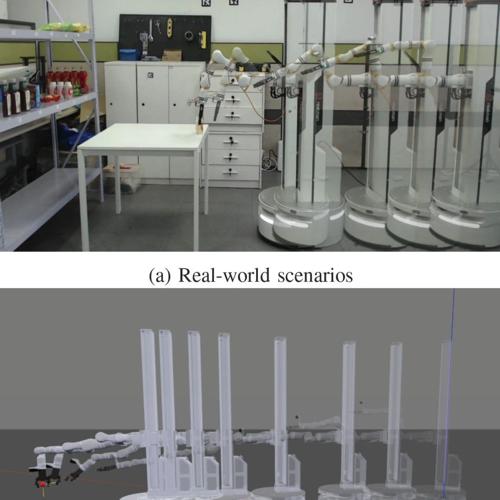
移动抓取研究提出了一种全新的EHC-MM框架,通过sig(ω)控制函数实现运动与操作的动态平衡,并结合MPBS确保视觉感知与执行的有效协同。实验结果显示,该方法显著提升了任务成功率和效率。
移动抓取研究提出了一种全新的EHC-MM框架,通过sig(ω)控制函数实现运动与操作的动态平衡,并结合MPBS确保视觉感知与执行的有效协同。实验结果显示,该方法显著提升了任务成功率和效率。

本项目基于 chatgpt-on-wechat 和 dify-on-wechat 二次开发,对接 Coze 平台,提供文本聊天、语音交互和插件功能,并配备 Web 后台管理界面。

Tern AI展示了一种仅使用地图信息和车辆传感器数据来定位汽车位置的技术,无需依赖卫星或Wi-Fi。该技术在SXSW上进行了演示,并且据称比GPS成本更低、更安全。