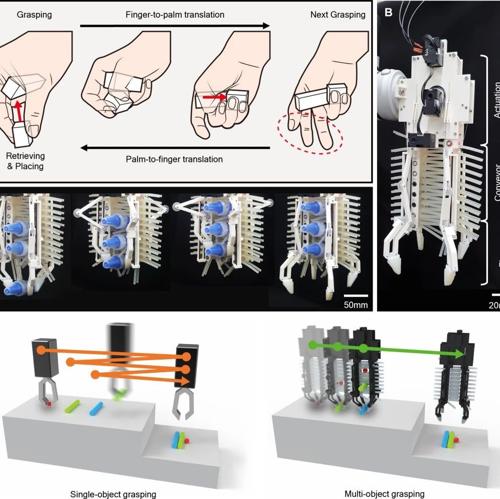
Science Robotics 仿生手一次抓多个物体,且像人手一样灵活存储、放置 2024年12月28日22时 作者 机器人大讲堂 韩国首尔国立大学的研究人员开发出了一种 新型多物体抓取机器人手MOGrip 。这款抓手 不仅可以同时