IEEE TRO发表!华科团队打造仿生隔振 + 负载调控的“双减压”悬浮背包,破解越野负重痛点 2025年6月7日23时 作者 机器人大讲堂 击,毫无缓冲地直接传递给使用者,这极易引发肌肉疲劳与关节损伤。与之形成对比的是, 主动悬浮背包融合可
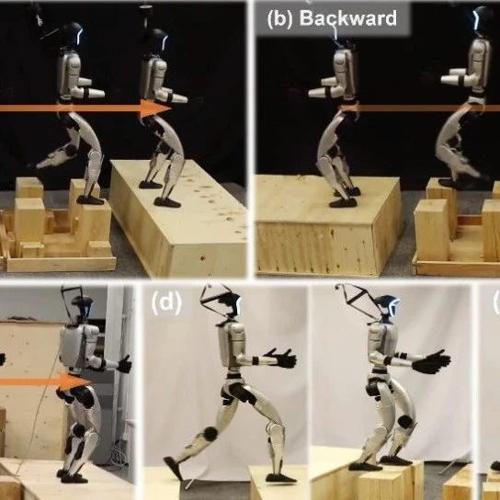
宇树Unitree G1再次Get新技能 凭借BeamDojo框架平稳穿越梅花桩、平衡木复杂地形! 2025年3月2日12时 作者 机器人大讲堂 境中,机器人需在有限的接触面上实现精确的足部放置,同时维持整体平衡与运动连贯性。传统方法多针对四足机
日本先进科学技术研究院打造Leafbot 实现振动驱动软体机器人复杂地形高效移动 2025年2月18日23时 作者 机器人大讲堂 器人学的技术范式。但目前,当前研究聚焦于驱动方式创新、材料体系优化与运动控制算法三大领域,其中振动驱