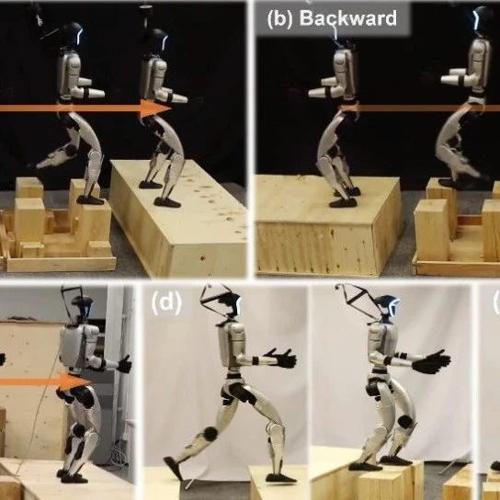
宇树Unitree G1再次Get新技能 凭借BeamDojo框架平稳穿越梅花桩、平衡木复杂地形! 2025年3月2日12时 作者 机器人大讲堂 境中,机器人需在有限的接触面上实现精确的足部放置,同时维持整体平衡与运动连贯性。传统方法多针对四足机