
视频理解“隐秘的角落”:多任务视频文本理解评测新基准VidText发布

VidText 提出了一套全面的视频文本理解基准,覆盖 27 个真实场景和多种语言。它包含从视觉感知到跨模态推理的多个任务,评估模型在不同粒度上的表现,并揭示了影响性能的关键因素。
VidText 提出了一套全面的视频文本理解基准,覆盖 27 个真实场景和多种语言。它包含从视觉感知到跨模态推理的多个任务,评估模型在不同粒度上的表现,并揭示了影响性能的关键因素。

近日,微软研究院与北京大学联合发布的新框架Next-Frame Diffusion(NFD)实现了每秒超过30帧的视频生成速度,并保持高质量画面。相比现有自回归视频生成模型,NFD采用帧内双向注意力和帧间因果依赖机制建模视频,并通过多步迭代和并行采样提高效率。
微软亚洲研究院联合清华大学、北京大学提出RPT预训练范式,将强化学习深度融入预训练阶段,通过生成思维链推理序列和使用前缀匹配奖励来提升模型预测准确度。

2025 北京智源大会召开,银河通用机器人Galbot亮相主论坛并展示端到端具身大模型GroceryVLA技术能力。此次发布展示了其在零售行业的真实商业落地能力,并发布了全开源人形机器人遥操作系统OpenWBT。

北京大学提出VGP方法,通过语义低秩分解增强图结构图像模型的参数高效迁移能力,在多种下游任务中实现媲美全量微调的性能。
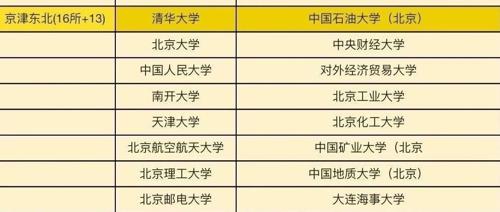
MLNLP社区致力于促进国内外机器学习与自然语言处理的学术交流。该社区涵盖了985高校及部分双非院校,如华为目标院校名单中包括多所顶尖高校。社区还提供了技术交流群邀请函,并介绍相关从业者深造、就业和研究方面的开放交流平台。

北京大学董豪老师课题组提出DexGarmentLab仿真平台和HALO泛化策略,解决柔性衣物操作中的数据依赖、物理真实性不足及算法泛化能力弱等问题。

北京大学杨仝教授团队发布FairyR1-32B模型,该模型基于DeepSeek-R1-Distill-Qwen-32B基座,通过微调与模型合并技术,在参数量大幅减少的情况下实现了数学和代码任务上的优异性能。

2025年5月26日,Datawhale与字节跳动扣子空间联合主办‘AI+X高校行’首场活动在北大启动,聚焦Agent技术普及,覆盖百所高校,提供从理论到实践的学习体验。
