
随着模型规模越来越大,大模型时代的工程能力和 research 能力逐渐变得同等重要。还记得几年前做科研经常看到一些paper改几行matlab、python,就能取得有效的的 performance。不过在当下,我估计很难了。
现如今大模型的训练、复杂的代码嵌套和各种工程挑战,我觉得对曾经做学术的人来说都不是很友好。我自己也深有体会,接触 Megatron-LM 之后,整个人都变得沉静了。
恰好最近看到一个博客,详细地介绍了训练大模型的各种技术。我看完之后,感觉深受启发,因此写一版自己对其的理解与反思,权当记录,也乐得分享,若对读者也能有所帮助,也十分荣幸。
https://jax-ml.github.io/scaling-book/训练LLM 常常让人感觉像是在搞炼金术,但其实理解和优化模型性能并没有那么神秘。这个 blog 的目标就是帮你揭开扩展语言模型背后的科学原理:TPU(还有 GPU)到底是怎么工作的,它们之间是怎么通信的,LLM 在真实硬件上是如何运行的,以及在训练和推理过程中,如何把模型合理并行化,让它能在大规模场景下高效运行。如果你曾经有过这些疑问:“训练一个 LLM 到底得花多少钱?”“我要自己部署这个模型,需要多大的内存?”“AllGather 到底是啥玩意?”那这些内容,应该会对你有帮助。
当我们在硬件上跑算法时,性能主要受到三个方面的限制:
-
• 计算速度 —— 也就是机器做数学运算的能力,比如每秒能处理多少次操作(OPs/second) -
• 带宽 —— 数据在内存、缓存、芯片之间搬运的速度(bytes/second) -
• 总内存容量 —— 也就是设备最多能装下多少数据(bytes)
这些限制就像给计算画出了一条 Roofline:上面顶着计算能力,下面托着内存和带宽瓶颈。通过这套 Roofline 模型,我们可以大致估算出某段计算最快能跑多快(上限)和最慢会卡在哪(下限)。
简单理解一下:如果算法数据太多、内存太小,那它就容易被“撑爆”;如果算法计算量很大但数据搬运太慢,那就等着“搬砖”;如果都不是问题,那就看计算核心有多能打了。这三点加起来,就决定了你模型在硬件上到底能跑多快、扩多大。后面我们会用这个模型来分析怎么高效地扩展模型到更大的硬件,比如 TPUs。
训练模型,哪里需要花时间?
我们运行一个模型,花时间的地方主要有三类:
1. 计算(Computation)
深度学习模型本质上就是一堆矩阵乘法,每个矩阵乘法由大量浮点加法和乘法组成,也就是所谓的 FLOPs(floating point operations)。我们使用的加速卡(GPU 或者 TPU)处理 FLOPs 的速度决定了计算所需要的时间。这里我们定义计算时间 为
举个例子直观理解一下,NVIDIA H100 每秒可以完成大约 9.89e14 个 bfloat16 的 FLOPs,TPU v6e 也差不多是 9.1e14。如果你有一个模型需要做 1e12 个 FLOPs,那在 H100 上大概只需要 1e12 / 9.89e14 = 1.01ms,在 TPU v6e 上大概是 1.1ms。
这告诉我们,只算数学运算的话,其实模型是可以很快的。
2. 芯片内部的通信(Communication within a chip)
模型运行过程中,张量需要在芯片的内存(比如 HBM)和计算核心之间传输。这个传输速度叫 HBM 带宽。对于H100来说,这大约是 3.35TB/s;而对 TPU v6e,大约是 1.6TB/s。
这部分搬数据的时间也需要算进去,特别是当数据量比较大时。
3. 芯片之间的通信(Communication between chips)
当你的模型太大,需要多个加速卡(比如多个 GPU 或 TPU)协作时,张量还需要在不同的芯片之间传来传去。不同的连接方式(比如 ICI, DCN, PCIe)速度不一样,单位和芯片内部通信速度一样,仍然是 bytes/second。到这里,我们也给通信时间 做一个定义:
估算总时间的方式
无论是计算还是通信,我们都可以粗略估计所需时间。并且:
-
• 理论下限(Lower bound):就是计算和通信中耗时更长的那个; -
• 理论上限(Upper bound):是两者耗时之和。
大多数时候,我们可以通过“通信和计算并行”来让实际耗时更接近下限。因此,优化的目标通常是让通信时间和计算时间尽可能重叠。而即使最坏的情况,也只是差一个因子 2(也就是最长不会慢两倍)。另外,如果计算时间远大于通信时间,那就说明硬件一直在计算、没有等数据,说明我们主要受限于计算能力,处于计算瓶颈(compute-bound)状态;如果反过来是通信时间大于计算时间,那就是我们大部分时间都在“等数据”,说明被通信瓶颈(communication-bound)限制了,FLOPs 的潜力没有完全发挥出来,有浪费。那么我们怎么判断一个操作是计算瓶颈还是通讯瓶颈呢?
算术强度
看一个关键指标:算术强度(Arithmetic Intensity),也叫 Operational Intensity。
注意这里的“通信”既包括芯片内部(如 HBM)也包括芯片之间(如 GPU-GPU)。这个值就表示:“每搬一个字节,能做多少次浮点运算”。直觉上来理解,如果算术强度高:说明每搬一次数据能做很多计算,计算时间就占主导,是计算瓶颈;如果算术强度低,说明大部分时间都在搬数据,计算单元在空转,是通信瓶颈;而这两者“谁主谁次”的拐点,就叫 peak arithmetic intensity(峰值算术强度),也就是:
peak FLOPs/s ÷ 带宽(bytes/s)
峰值算术强度是硬件的一个特性。我们以TPU v5e 为例,它最大计算能力是 1.97e14 FLOPs/s,带宽是 8.2e11 bytes/s,所以它的峰值算术强度大约是1.97e14 / 8.2e11 ≈ 240 FLOPs/byte,这就意味着,如果一个算法的算术强度低于 240,它会变成通信瓶颈。以点积为例,计算两个向量 ,假设它们的长度都是 N,每个元素是 bfloat16:
-
• 要从内存读出 x 和 y,每个都是2N 字节,一共 4N 字节(注意:bf16 每个元素是 2 字节,所以这里乘以 2); -
• 做 N 次乘法,N-1 次加法,共 2N-1 个 FLOPs; -
• 最后再写回 2 字节。
当 N 趋近于无穷大时,整体的算术强度 (2N-1) FLOPs / (4N+2) bytes 近似为 0.5 FLOPs/byte,这个值远远小于 TPU 的 240 FLOPs/byte,所以这个操作是通信瓶颈,说明你即使硬件很强,也没法发挥它的全部计算力。
总结一句话:算术强度就是告诉你:你搬的每一份数据,能不能被“吃干榨净”。如果搬运得多,算得少,硬件再强也浪费;如果算得多,搬得少,那你就能用满算力。这就是判断计算 vs 通信瓶颈的核心标准。
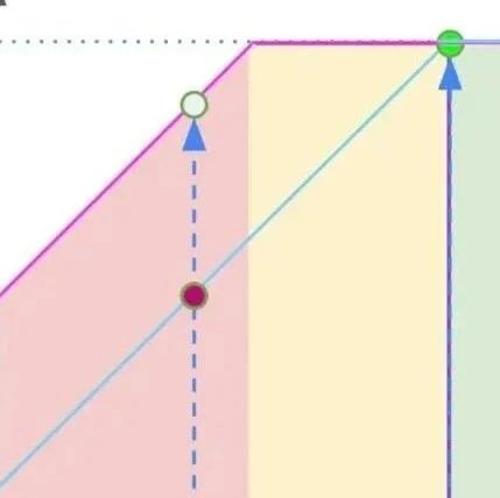
Roofline
我们可以用一种叫做 Roofline 图的方式,把计算能力和内存带宽的权衡形象地画出来。这个图是个对数坐标图,横轴是算术强度(FLOPs per byte),纵轴是你在特定硬件上能达到的最大吞吐量(FLOPs/s)。
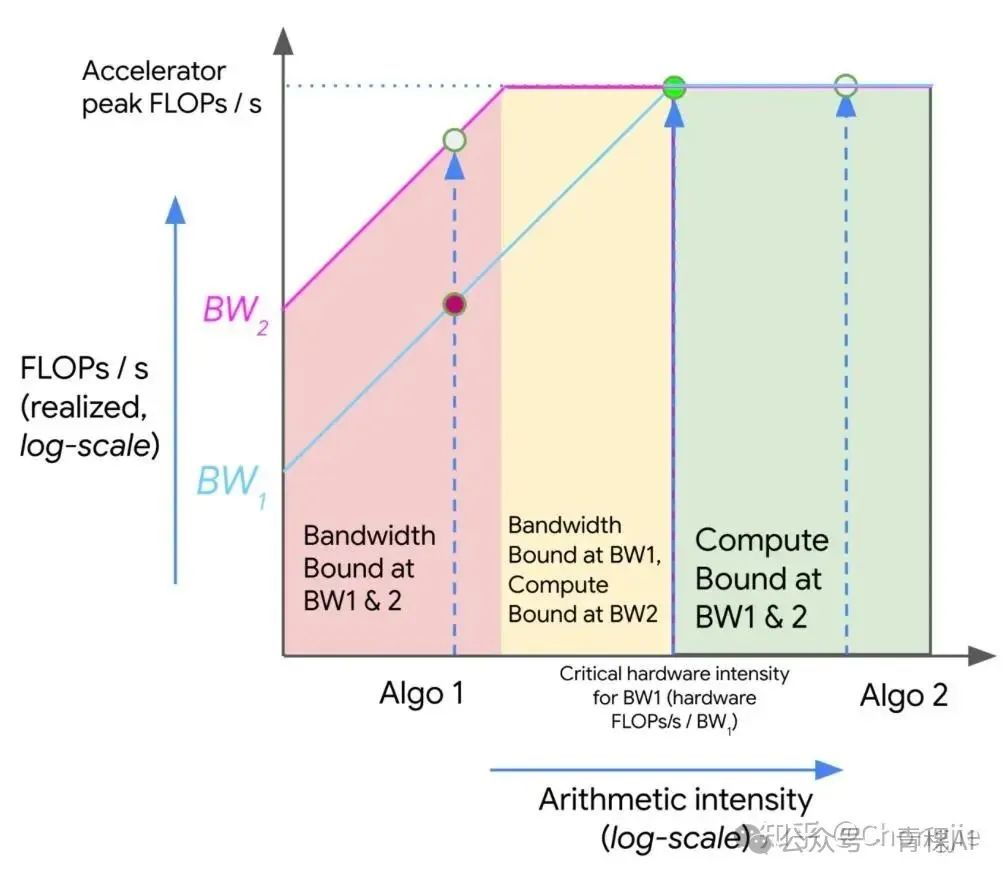
图上会看到几条线:
-
• 红色区域:算法的算术强度太低,无论你的带宽是 BW1 还是 BW2,都会被带宽限制住,硬件的 FLOPs 没有被用满。 -
• 黄色区域:算法在低带宽(BW1)下受限,但如果你换个高带宽(BW2)就能跑快。 -
• 绿色区域:算术强度足够高,不再受内存带宽影响,这时瓶颈变成了计算能力,硬件跑满了
图中也有两个算法:
-
• Algo 1(左边):算术强度低,受限于内存带宽,只用到了硬件一小部分计算力,是通信瓶颈。 -
• Algo 2(右边):算术强度高,达到了硬件的峰值 FLOPs/s,是计算瓶颈,充分利用了硬件。
这张图告诉我们:如果一个算法在红区,你可以通过提高算术强度(比如增加计算量、减少内存访问)或者提高内存带宽来让它更快;如果一个算法已经在绿区,那再提带宽或者强度没啥意义了,因为已经计算瓶颈了。
矩阵乘法
讲了这么多,我们来看一个实际的应用。我们考虑最常见的算法之一:矩阵乘法(matrix multiplication,简称 matmul)。
假设你有两个矩阵:X,大小 bf16[B, D],Y,大小 bf16[D, F],得到结果矩阵 Z bf16[B, F]。为了计算这个 matmul,你得从内存里读取 2DF + 2BD 字节的数据,执行 2BDF 个 FLOPs(每次乘法+加法);然后把 Z 写回内存,要写 2BF 字节。
如果我们假设 B(batch size)远小于 D 和 F,也就是 token 数相对 embedding size 和头数小得多(这在 Transformer 中很常见),那么算术强度大约就是:
换句话说,这个强度跟 batch size 成正比。所以,在 TPU v5e 上,如果你用的是 bfloat16 类型,那么只要你的 batch size 超过 240 个 token,你就可以做到 compute-bound。
当然,这些都是单卡内的 memory-bandwidth 限制,也就是看显存带宽能不能喂饱计算。但这其实只是最简单的一类 roofline,现实中我们更常遇到的瓶颈是多卡之间的通信带宽,尤其是在多个 TPU/GPU 上做分布式矩阵乘法时。来举个例子,还是原来的 X 和 Y,你把它们在维度 D 上一分为二,分别放在两张卡(比如 2 个 TPU)。现在你要做矩阵乘法,做法如下:
-
• 在 TPU 0 上:算前一半: A = X[:, :D//2] @ Y[:D//2, :] -
• 在 TPU 1 上:算后一半: B = X[:, D//2:] @ Y[D//2:, :] -
• 然后两张卡交换 A 和 B 的结果,把它们加起来得到最终输出。
对于这一次,每张卡只做一半的工作,所以计算时间是原来的一半:
而通信时间是两个卡交换结果的时间,也就是:
我们要找出什么时候通信时间小于计算时间(也就是还能跑满卡,不受通信限制),解这个不等式:
也就是说:只要你的 embedding size D > 8755,通信就不是瓶颈,你是 compute-bound;反之就是 communication-bound。在这个场景下,决定是否 compute-bound 的,不是 batch size B,而是特征维度 D。
多卡分布式计算下的 roofline 限制关键在于通信带宽,是否能充分利用硬件取决于通信 vs. 计算的比例 —— 而这个比例依赖于模型维度,不是 batch size。理解这个规律,才能知道你什么时候该切分模型、怎么切分才能不踩通信瓶颈。
(文:机器学习算法与自然语言处理)