

多模态融合算法已经成为机器人领域的研究前沿,科研工作者需要一种高效、可靠的物理载体来完成从理论到实践的跨越。在此背景下,Franka Robotics 机器人凭借其独特的优势,成为推动算法模型从感知到行动全面落地的关键枢纽,帮助研究者构建通用型智能机器人平台,提高研究效率。
尤其是 Franka Research 3(FR3)机器人,它所具备的高灵敏力控性能,以及易用性、开放性的特点,不仅赢得了国内外顶尖研究机构开发者的青睐,更让其成为了契合科学研究需求的领先机器人平台。而在多种模型算法加速普及的当下,开发者们越来越看重机器人在操作系统支持、编程语言接口、算法扩展性等软件层面的表现,Franka Robotics通过持续优化产品,在这些关键领域构筑起自身的优势,从而脱颖而出。

此次Franka Robotics 机器人全新升级,进一步拓展了FR3的软硬件能力,App package生态重磅扩容,新增实用软件包,有效提升了研发效率,为全球科研人员带来更强大的新功能与新平台。
那么,Franka Robotics 机器人究竟是如何赋能研究的?它的未来又将展现出怎样的潜力?本期讲堂,我们一同深入探寻。
▍全球1400篇论文选择背后:Franka Robotics 的科研高适配性
Franka Robotics 机器人长期以来是科研界的明星工具。据机器人大讲堂统计,2024 年有近 1400 篇研究论文涉及使用 Franka Robotics 机器人作为一种通用型智能机器人平台开展多种研究。

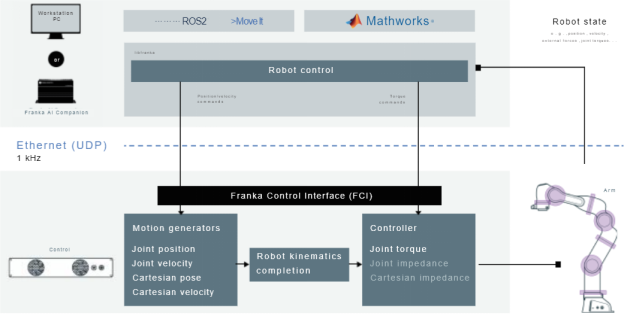
科研工作者广泛认可源于 Franka Robotics 对科研场景的深度理解。其特有的控制接口(FCI)为研究者提供了直达底层的双向交互通道:通过以太网连接外部工作站,既可实时获取机器人的关节状态、力控数据等核心参数,亦可实现毫秒级的精准控制,这种“透明化” 的底层访问能力,让力控精度调试、算法实时验证等科研刚需得以高效落地。
对于需要二次开发的复杂实验,其灵活性更是不可或缺—— 研究者可突破预设功能限制,根据课题需求自定义控制逻辑,从基础的轨迹规划到复杂的多模态融合控制,都可在统一平台上快速实现。

具体到研究场景中,Franka Robotics 的适配性更显突出:
研究案例一:在《ReKep: Spatio-Temporal Reasoning of RelationalKeypoint Constraints for Robotic Manipulation》文中,研究者基于安装在 Vention 框架移动底座上的 FR3构建固定式单 / 双臂平台,在衣物折叠、鞋子打包等任务中验证了 ReKep 框架在复杂双臂协同操作中的有效性。
研究案例二:《LLARVA: Vision-Action Instruction Tuning for Enhanced Robot Learning》在仿真与真实环境中均采用 FR3,在 RLBench 仿真中测试 18 项任务。作者指出, Franka Robotics 的 7 自由度特性适合测试模型泛化能力,单目相机输入下成功率达 93.75%。

从基础研究到应用探索,Franka Robotics 机器人的价值不仅在于提供稳定的硬件载体,更在于构建了一套兼容多元研究路径的“科研基础设施”:无论是验证全新的力控算法,还是探索机器人与模型算法的结合,其开放的接口、标准化的开发环境与可扩展的硬件架构,显著降低了研究者的工具适配成本,使其能将精力聚焦于核心创新。
这也正是全球千余篇论文选择它的核心逻辑—— 在快速迭代的机器人研究领域,一个能 “无缝对接想法与实践” 的平台,本身就是加速突破的关键。
▍Franka Research 3 硬件升级亮点
Franka Research 3 作为一款极度灵巧的高灵敏力控机械臂,在硬件设计上延续经典的七自由度(7-DoF)架构。这一设计使得其运动学特性与人类手臂极为相似,可在复杂环境里实现流畅自然的运动,不仅可以灵活巧妙地避开障碍物,还能精准高效地规划并执行路径,准确抵达目标位置。与此同时,此次升级新增了力矩传感器自校准功能,该功能可确保机器人在整个使用寿命周期内,始终维持高度灵敏的响应状态,有效适应各类环境变化以及复杂的操作条件,从而攻克了长期实验过程中数据漂移这一棘手难题。
在外观设计与操作便捷性优化方面,FR3 同样亮点颇多。例如关节部位增添了清晰醒目的编号以及旋转方向正负标识,方便用户快速识别与操作;基座部分增加了世界坐标系 X/Y 轴指示,为机器人的定位与方向判断提供了直观参照;针对 A4/A6 关节,调整了恢复位姿时的参考箭头位置,使其更加符合操作习惯。这些外观细节的改进,搭配上现代化、简约流畅的整体设计风格,不仅让机器人的外观更具科技美感,更显著简化操作与部署流程,大幅提升了用户的操作体验。

正如某位研究者所言,“力控精度是机器人触觉的基石”。FR3 的硬件性能为机器人赋予类人感知、理解与执行能力,让算法研究者可专注于技术创新,其高精度与高灵活性也为 3C 电子装配、仓储搬运、服务机器人等领域提供智能化平台支撑。
▍Franka Research 3 软件优化升级——解锁全新操作软件包 研发效率提升
软件升级是此次 Franka Research 3 迭代的重点,通过更主流的编程方式降低使用门槛,使其成为开箱即用的研究工具。
全新 Desk API 升级提供强大的程序化控制能力,支持用户通过编程方式配置和管理FR3(如通过编程解开抱闸、激活FCI、清除安全违规记录等),及执行更多替代手动的操作。其高效执行系统管理任务,提升自动化水平与研究效率,减少停机时间,为构建复杂自动化流程、实现云边协同及多机调度管理奠定基础。
此次升级全面开放 App Package 功能。
该功能采用图形化界面,进一步降低开发者使用门槛,适合教学与研究开发,助力开发者快速构建与迭代任务流程。
同时,App Package 内的应用程序安全可靠,可与 Franka 内部安全机制集成,支持远程诊断。为科研人员、工程师及教育工作者提供直观且强大的平台,助力高效实现机器人操作流程及向高级系统集成和智能应用过渡。
更值得关注的是,FR3 率先全面支持 ROS 2 Jazzy,这一升级为突破研究边界提供动力。
依托 ROS 2 Jazzy 的下一代兼容性,研究者可快速构建实时、可高扩展的分布式机器人应用:应对复杂协作与高精度任务时,能利用其增强的通信机制与先进控制功能,实现低延迟、高可靠性的指令传递与执行;同时支持 FR3 与其他兼容平台、传感器及开发工具无缝集成,打通异构生态壁垒,拓展研究资源与可能性。
此外,FR3 已全面深度集成开源运动规划与控制框架 MoveIt 2,并通过 ROS 2 Jazzy 释放其潜能。MoveIt 2 的深度集成提供强大且标准化的运动规划工具,使 FR3 能无缝融入基于 ROS 2 的全球机器人研发生态,加速理论算法到智能机器人行为的落地,为探索下一代自主机器人和智能工厂应用创造条件。
▍结语与未来
作为全球机器人研究者的“伙伴”,Franka Research 3 的进化不仅是一次技术迭代,也推动着机器人研究范式的更新。它以硬件精度突破、软件开放优化开发体验、生态兼容连接全球创新为支撑,为研究者提供更强大的工具。
FR3 Duo 双臂机器人系统(FR3 Duo Arm System),以及即将发布的触觉移动机器人(Tactile Mobile Robot ),将会为科研实验室提供了更丰富的研究工具,即将重磅亮相,敬请期待,共同见证智能机器人技术的革新!



FR3 凭借其开放生态连接实验室创新与产业变革,其高灵敏力控与分布式架构可适配医疗康复精密操作、智能工厂柔性产线、服务机器人场景泛化等多元场景。
未来,随着更多研究者加入 Franka Robotics 机器人生态,有望共同推动机器人从执行命令的工具向理解环境、自主决策的阶段演进,而FR3 正是这一进程的重要平台。
(文:机器人大讲堂)