


肌肉力量作为复杂信号,其收缩或拉伸有时并不伴随宏观肢体运动,也因此难以被传统传感器所感知。
随着人机界面(HMI)在家庭机器人、康复外骨骼以及远程医疗等领域的不断拓展和广泛应用,市场对于能够与人体生理实现无缝集成的传感界面的需求日益增长且愈发迫切。目前,现有的各类肌肉力量监测工具均存在一定局限性:肌电图无法对被动肌肉收缩状态进行测量;光学和超声波技术由于采用刚性换能器,在监测过程中容易产生运动伪影;强粘性肌肉传感器在持久粘附性以及移除后重新应用的稳定性方面面临挑战;磁法测量需手术植入磁铁,有感染风险……
在此背景下,如何让机器精准“读懂”人体信号,切实、准确地捕捉和解读人体肌肉活动及其输出力,依是实现人机自然交互过程中亟待解决的关键难题。
▍提出FMEIS,实现人机交互新突破
据探索前沿科技边界,传递前沿科技成果的X-robot投稿,来自新加坡南洋理工大学的王一凡教授团队面对肌肉力量监测难题,在新加坡科技研究局、南洋助理教授基金等项目的支持下进行了深入研究,并于近期开发出一款柔性多通道肌肉电阻抗传感器(FMEIS)。
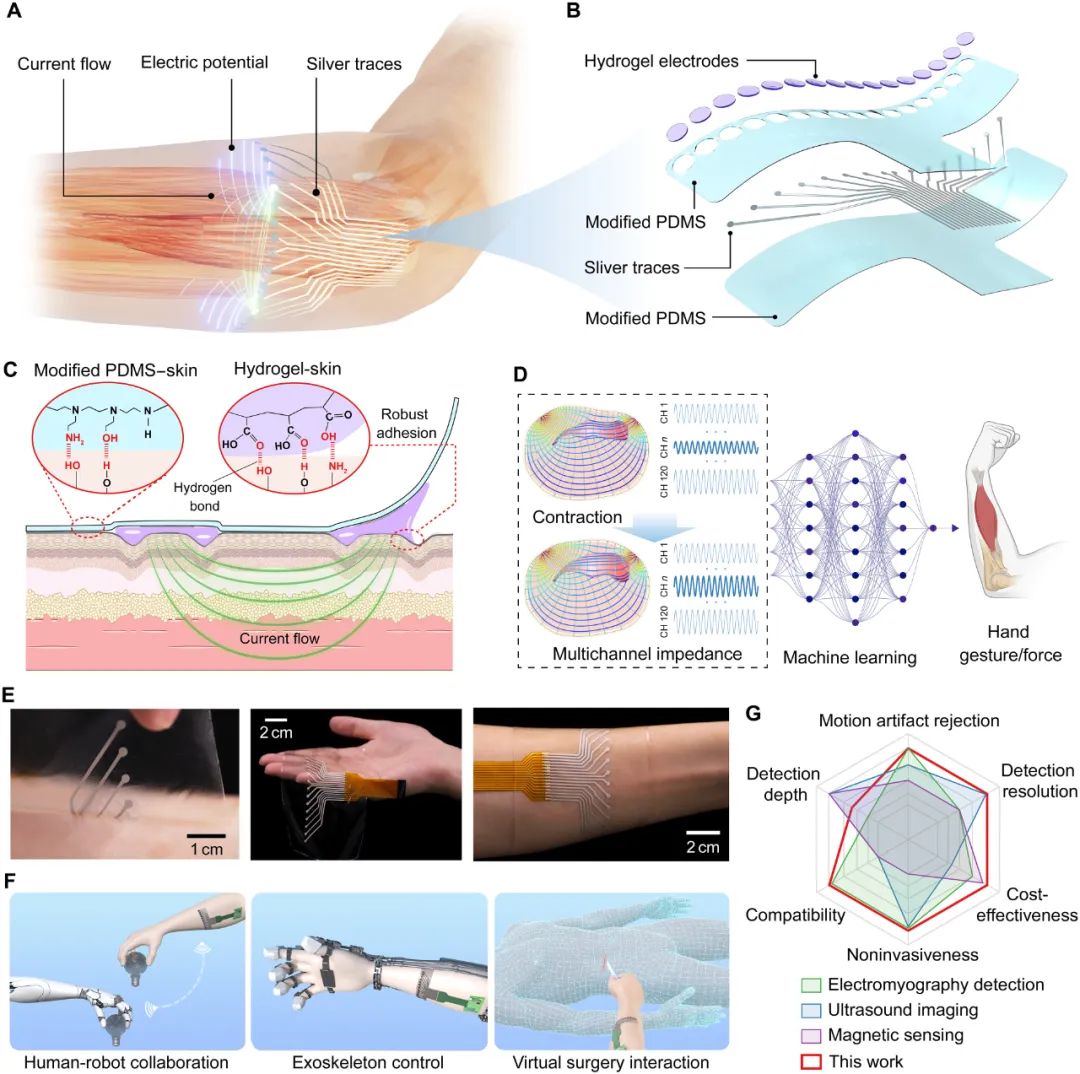
图1:柔性多通道肌肉电阻抗传感器(FMEIS)
FMEIS传感器垫厚度仅220 μm,弹性模量为212.8 kPa,与人体皮肤的弹性模量范围[420至850 kPa]十分接近。实际应用测试中,FMEIS表现卓越,在手势分类任务中实现了98.49%的准确率,在肌肉力量预测任务中达到了0.98的判定系数 ( R² )。
与传统的肌电(EMG)信号监测方式相比,FMEIS具有独特优势。传统肌电信号只能感知有神经激活的表层肌肉情况,而FMEIS通过施加低强度高频电流,能够感知肌肉组织的阻抗变化,进而捕捉深层肌肉在收缩过程中的阻抗变化。基于此,FMEIS不仅可以精准识别手势、预测肌肉输出力,即便在人体无显著动作的情况下,也能做出准确响应,极大地丰富了可用于高级人机界面(HMI)的生理反馈信息,为人机界面的构建提供了突破性的技术手段。

近日,该研究的相关论文成果已以“Flexible Multichannel Muscle Impedance Sensors for Collaborative Human–Machine Interfaces”为题,发表于《Science Advances》。新加坡南洋理工大学的李君威博士为论文第一作者,王一凡教授为论文通讯作者。
▍两大关键,共同构成FMEIS系统
FMEIS系统由一个轻质的4g传感器垫和一个53g的控制单元组成。
-
传感器垫
传感器垫由一片超薄(厚度仅220微米)、高柔性(杨氏模量约为212.8 kPa)的可重复使用贴片构成,佩戴在前臂上。该贴片通过50 kHz、0.4 mA的安全交流电流进行多通道信号注入与采集。传感器垫采用自主设计的拉伸型导电图案、高粘附性封装材料以及导电水凝胶电极,确保在大幅动作下仍能保持良好的贴合与信号稳定性。
其低模量、高粘附性的设计,主要得益于采用了改性聚二甲基硅氧烷基底和封装材料。该材料能够与皮肤形成可逆氢键,从而确保在长时间使用过程中,信号质量始终保持稳定,并且可以实现可靠的重复使用,不会出现明显的粘附性下降问题。
此外,导电水凝胶电极的加入,有效降低了接触阻抗,进一步提升了信号的稳定性。嵌入在传感器垫中的可拉伸电路,具备出色的柔韧性,能够承受高达50% 的应变,且不会对信号完整性产生任何影响。
通过多通道信号注入与采集,传感器垫可实时监测肌肉电场变化。当肌肉收缩时,前臂横截面变形导致电场扭曲,进而在电极处测得电位变化。通过数值分析,可推断出底层肌肉的收缩状态。
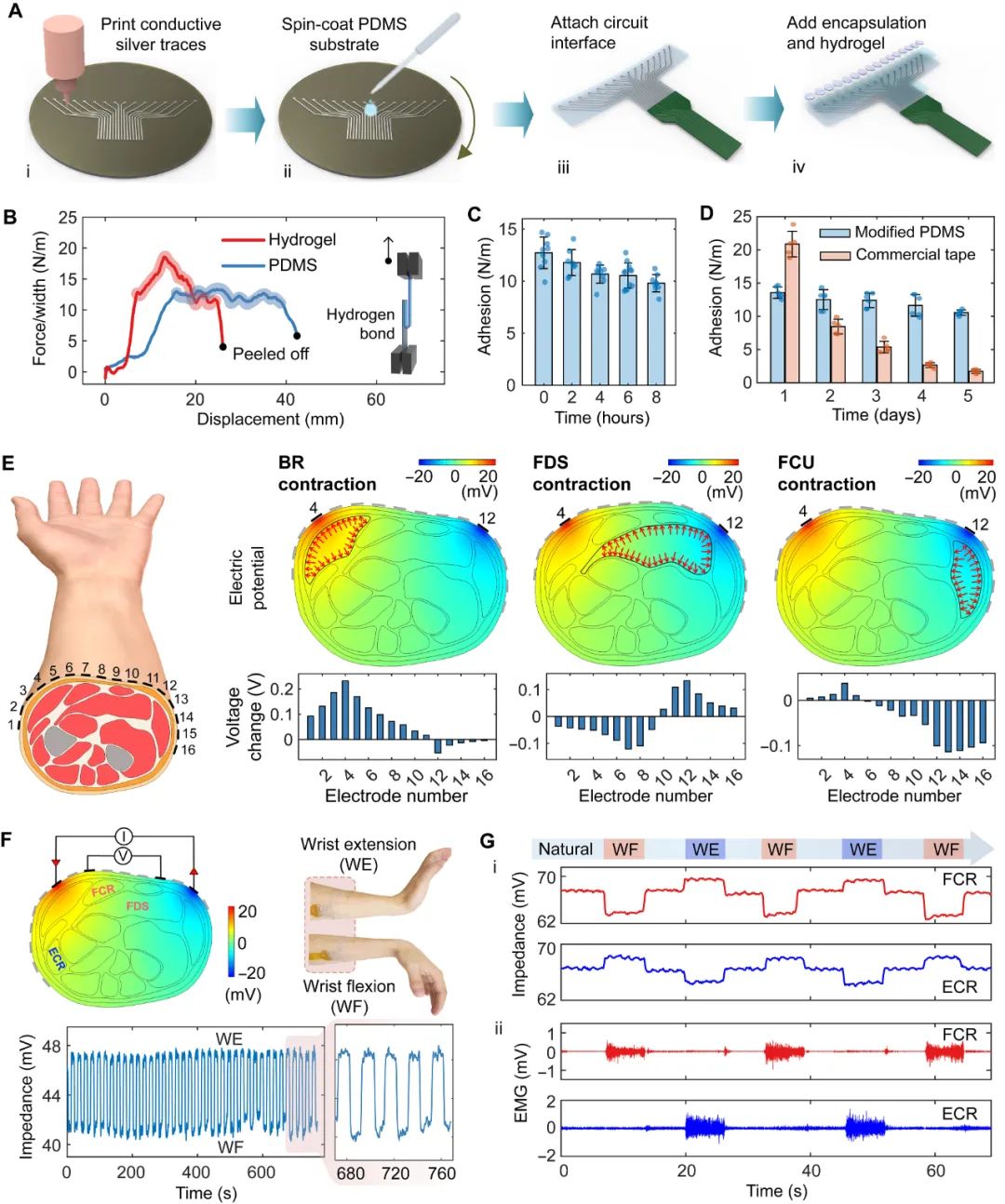
图2:FMEIS的拉伸、黏附性能及其多肌肉收缩感知
-
控制单元
FMEIS控制单元运用先进的机器学习算法,对多通道阻抗数据进行高效处理,进而实现手势分类和肌肉力量预测功能。基于精心设计的薄粘性传感器垫,该系统在复杂手势识别测试中准确率达98.5%;在肌肉力量回归分析中拟合优度R²高达0.98。更具优势的是,其可感知皮下约30毫米内肌肉区域的动态状态,弥补了EMG对深层肌肉不可测的盲区。如此高的检测精度,充分确保了 FMEIS 在多种人机交互应用场景中,包括人机协作、外骨骼控制以及虚拟手术等,都能展现出可靠稳定的性能。
▍实验测试,验证优越性展示多功能
为更全面地凸显FMEIS的关键优势,研究团队对各类肌肉收缩检测方法在运动伪影抑制、检测深度、分辨率、兼容性、成本效益以及非侵入性等多个关键性能指标方面进行了细致对比。
-
手势分类
将连续阻抗模式流用于10个常用手势分类,传感器垫置于前臂内侧。通过主成分分析评估训练数据质量,显示手势边界清晰;用单因素方差分析自动特征选择,以完全连接神经网络为分类模型,总体准确率98.22%,凸显FMEIS高可重复性。
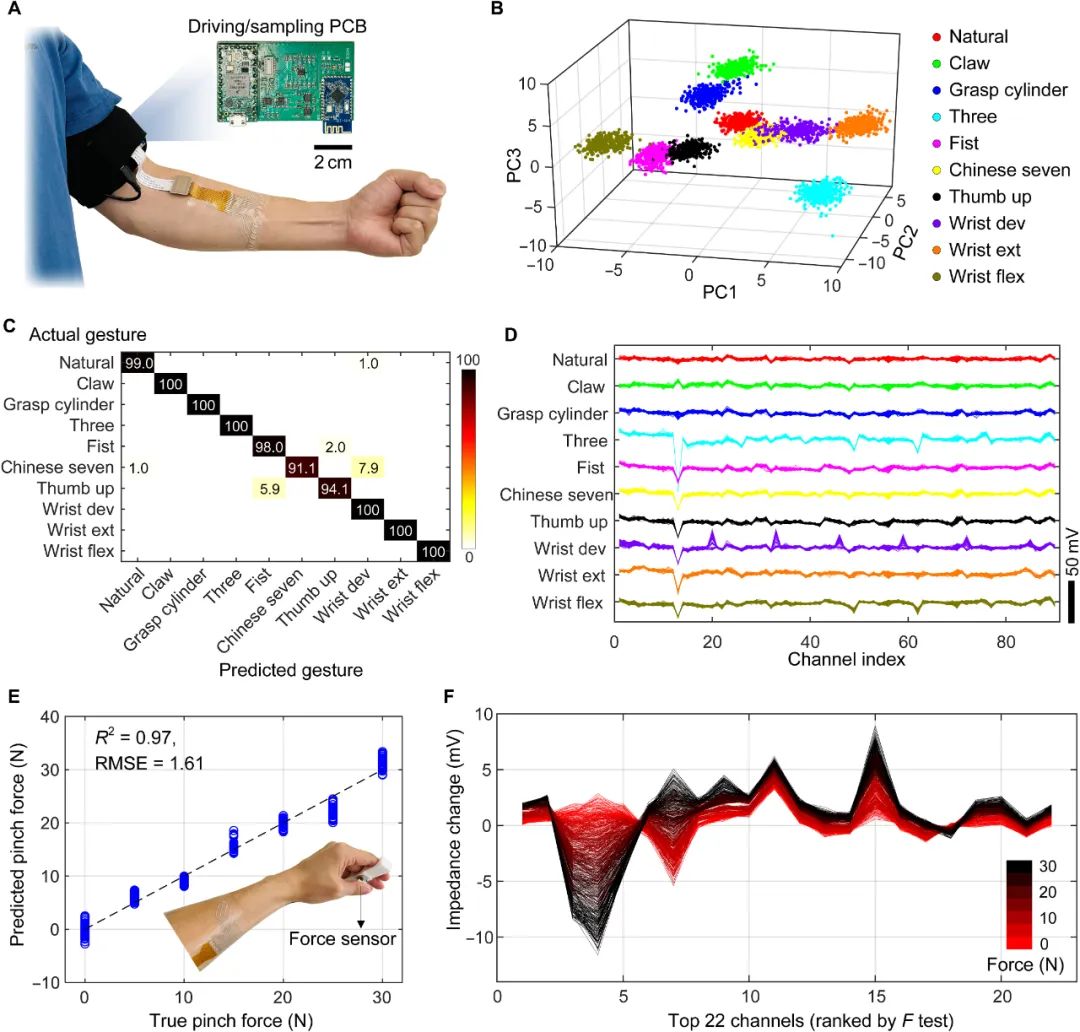
图3:FMEIS手势分类和肌肉力回归预测
-
肌肉力量回归分析
以捏动作为测试用例,传感器垫贴于FDS肌腹上方。用二次支持向量机作为力回归模型,F测试方法自动特征选择,回归结果显示预测夹力和真实夹力R²为0.97,RMSE为1.61N,表明FMEIS准确测量肌肉力量潜力大。
-
个体间稳健性和普遍性验证
通过对三位参与者进行手势分类和肌肉力量回归分析,研究团队发现FMEIS平均手势分类准确率98.49%,肌肉力量回归平均R²值0.98,这表明其对皮肤阻抗和脂肪组织厚度变化稳健性强。FMEIS 有望突破其他技术局限,并应用于三个HMI场景。
-
FMEIS VS EMG传感器
为证明FMEIS优于传统EMG传感器,实验进行了检测能力对比。将FMEIS附着在参与者前臂,16电极分两组,分别捕捉FCR和ECR肌肉活动,参与者重复做腕屈伸运动。从电极收集的阻抗数据能准确反映肌肉主动收缩和被动拉伸。而商用EMG传感器记录的信号,在肌肉被动拉伸时无电活动,只能检测主动收缩。这表明FMEIS可有效测量主动和被动肌肉运动,克服传统传感器局限。此外,FMEIS能检测不同深度肌肉驱动的手势,最大检测深度约30毫米,相关性能指标有详细讨论。
在人机协作、外骨骼控制和虚拟手术三个代表性场景中,研究团队也就FMEIS的多功能性进行了展示。
-
人机协作
在典型应用场景验证中,FMEIS成功实现了操作者与协作机器人之间的自然交互。在没有明显手部动作的情况下,FMEIS便可通过肌肉信号解析操作者的操作意图,驱动机器人完成精密同步操作,极大提升工业组装任务的效率与安全性。相较传统技术,其对肌肉微弱收缩变化更为敏感,有助于降低交互过程中的潜在碰撞风险。
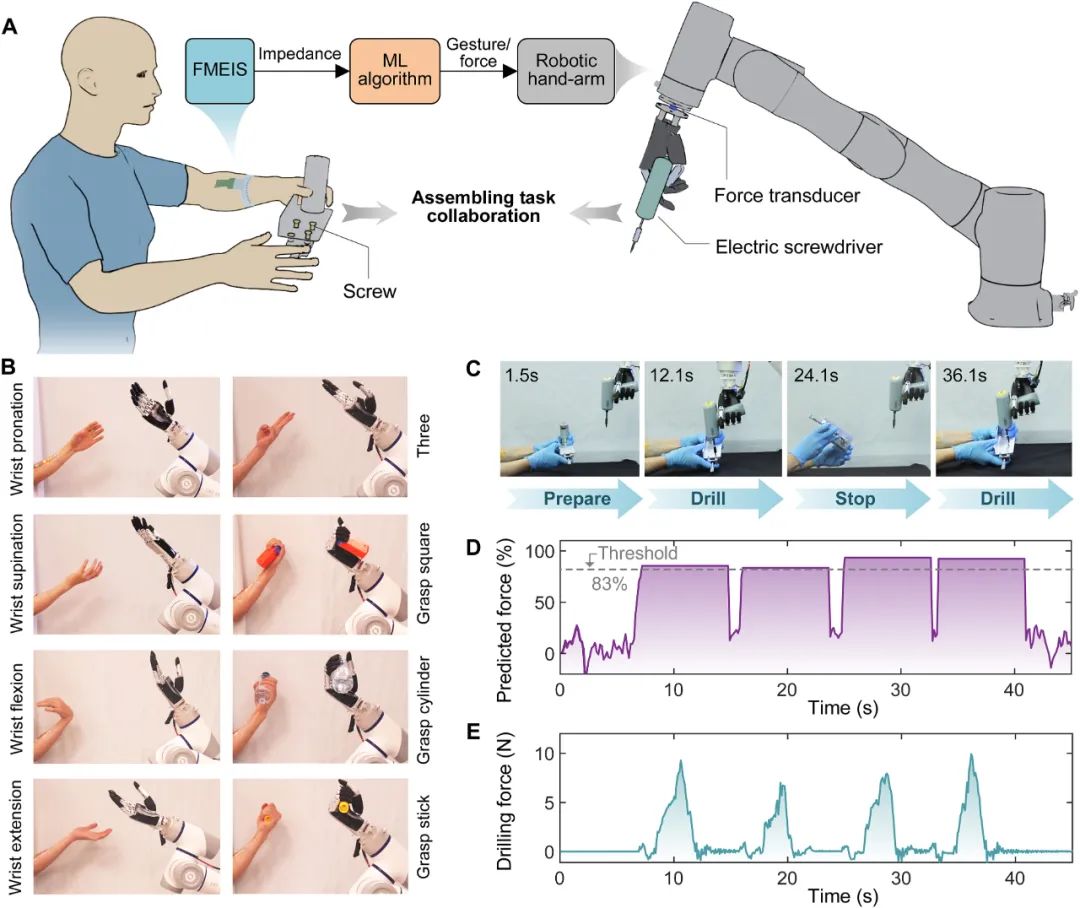
图4:FMEIS的人机协作应用
-
外骨骼控制
FMEIS还可用于调节外骨骼设备输出力,实现动态辅助。在手部外骨骼测试中,FMEIS输出信号驱动的外骨骼响应延迟仅为756毫秒,输出趋势与实际握力高度一致。在增强握力实验中,FMEIS驱动系统将最大输出提升了65%。与EMG系统的并联使用实验表明两者信号无干扰,且在8分钟持续用力测试中,FMEIS有效延缓了肌肉疲劳的发生。
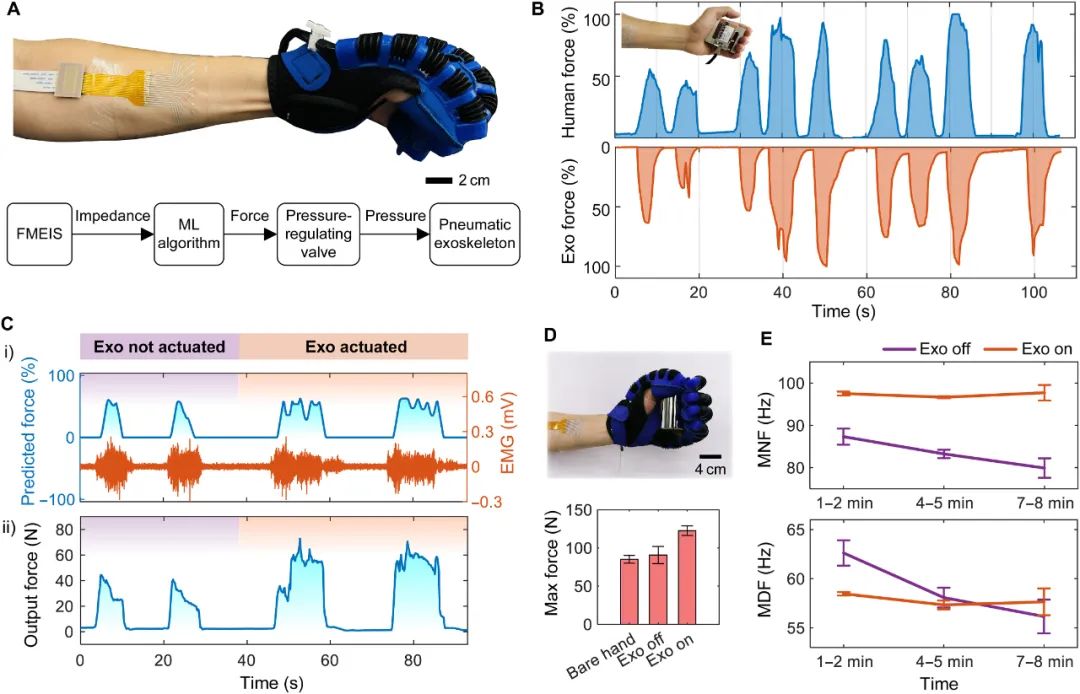
图5:FMEIS控制外骨骼实现助力
-
虚拟手术
在虚拟手术场景中,FMEIS作为操作者与VR系统之间的关键桥梁,可精准反馈手势与力量信息,控制虚拟手术刀沿预设路径完成仿真切割任务。手术刀的前进速度与切割轨迹依据肌肉发力的动态预测值自动调整,极大提升了虚拟手术系统的实时响应与拟真程度。该系统在未来有望与触觉反馈系统联动,实现可穿戴、沉浸式远程手术控制。
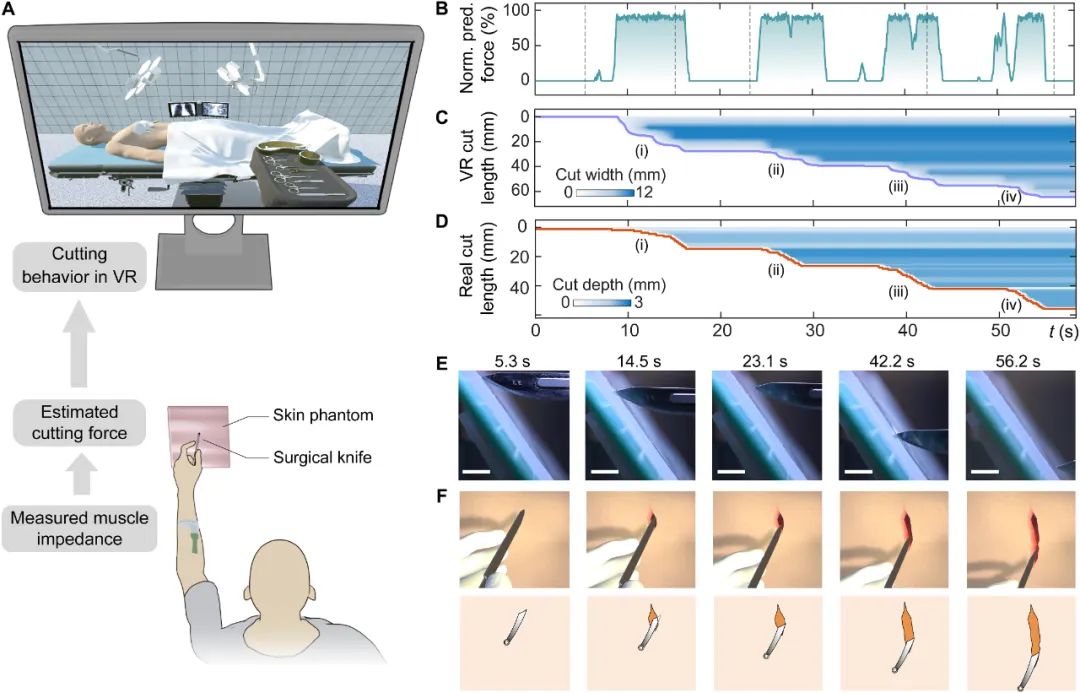
图6:FMEIS控制虚拟现实手术
通过系统性实验测试与多场景应用展示,研究团队就FMEIS柔性生物传感平台的技术优势进行了充分验证。该平台兼具皮肤亲和性强、抗干扰能力优异、可重复使用等特性,能够以非侵入式测量方式实现肌肉动态信号的高精度捕捉,且与主流肌电监测系统具备良好兼容性。基于交流微电流的创新技术方案,经安全性验证可满足人体长期使用需求。
作为肌肉信号采集领域的突破性成果,FMEIS 不仅革新了传统测量范式,更为构建自然高效的人机交互界面提供了关键技术支撑。随着技术的持续迭代,FMEIS 有望在康复机器人、智能可穿戴辅助设备、神经接口等前沿领域实现深度应用,展现广阔的产业化前景。
▍关于X-robot
X-robot是中关村机器人产业创新中心与机器人大讲堂联手打造的权威性信息发布品牌专栏,集前沿探索、产业研究、知识普及于一体,致力于积极推动新质生产力的生成与发展,助力我国乃至全球机器人行业的蓬勃繁荣。X-robot立足国际化视野,通过全方位、多角度的挖掘与追踪,生动展现机器人前沿技术与尖端成果,为学术界、产业界及公众提供一个洞见未来、共享科技的重要窗口。
参考文章:
https://www.science.org/doi/full/10.1126/sciadv.adv3359
(文:机器人大讲堂)