


邮箱|Jessica@pingwest.com
“CVPR的注册队伍现在在大厅里来回绕了2.5圈。如果你还没到,可以睡个懒觉——等待时间至少45分钟。”
6月14日,全球计算机视觉顶会CVPR 2025在美国纳什维尔落下帷幕的前一天,社交媒体上仍有人在“抱怨”着入场的长队,而这只是今年大会火爆程度的一个缩影。
整座城市都因上万名 AI 研究者的涌入改变了节奏:机场里,背着电脑包、戴着参会证的人随处可见;市中心的酒店几乎全满;会场走廊里,抱着电脑席地工作的研究者、匆匆穿梭于各个分会场的人群、永远排成长龙的咖啡区,共同构成了这场 AI 盛会最典型的风景。

今年 CVPR 的竞争异常激烈。官方数据显示,大会共收到创纪录的 13,008 篇论文投稿,最终录取率则是历届新低,仅为 22.1%。能获得口头报告(Oral)机会的更是凤毛麟角,只有 96 篇,占比约 3.3%。
在海量的论文和讨论中,两大技术风向标尤为明确。其一,3D视觉正迎来爆发前夜,成为高质量研究成果和demo展示最密集的领域。本届的最佳论文VGGT,就是一个能高效地从2D图片中重建3D信息的端到端方案,一作王建元是华人研究员。其二,“世界模型”一词无处不在,频繁出现在各种论文、海报和研讨会中,成为全场热议的焦点。另外,包括谢赛宁、苏昊、郑奇立在内的多位华人学者亦获得多项奖项与提名,中国研究员的活跃度和影响力持续提升。
与此同时,一个更宏观的趋势是:CVPR的学术界与产业界边界正在快速模糊。会场随处可见Meta、Google、NVIDIA的logo,大量参会者佩戴企业工牌,“从论文到产品”成为热门议题。一位连续参会者告诉我们,今年的CVPR更像是一场技术和产业界紧密结合的大集市,一个全球视野下技术人才、成果、场景三位一体的竞速场。
而就在“前沿技术趋势”、“产业深度融合”和“华人力量崛起”这三大焦点的交汇处,一个来自中国的身影显得尤为特别。
在今年CVPR自动驾驶分论坛(WAD)上,小鹏世界基座模型负责人刘先明发表了题为《Scaling up Autonomous Driving via Large Foundation Models》的主题演讲。与众多“论文参会型”企业不同,小鹏汽车是作为唯一受邀的中国车企,带着在工业领域的重磅实践经验登场。当其他参会者分享还在探讨“如何将研究成果应用于产业”时,他们的主题恰恰相反:如何用产业的真实数据和研发经验,来推动基础科研的边界。

讲台上,刘先明的开场白简单直接:
“我大概是今天唯一一个来自大规模量产汽车公司的分享者。”
这番话点明了演讲的独特视角:接下来的内容,将来自一个每天处理真实道路、真实用户和海量量产车数据的研发团队。在场的AI学者们将听到的,不再是纯粹的理论推演,而是一套在产业一线被反复捶打和验证过的解题思路。
这是小鹏自今年 4 月发布 720 亿参数的“世界基座模型”以来,首次在国际学术顶会上完整披露其自动驾驶研发进展。不仅带来了工业界首次对“扩展法则”(Scaling Law)在自动驾驶领域的系统性验证,结合“云端基座模型 + 强化学习”的方法论,还公开了已被 DeepSeek 验证的“知识蒸馏”路径,将 VLA(Visual-Language-Action)模型高效部署在自研芯片上的最新实践。
一场由“工业界反哺学术界”的大型案例分享,就此展开。
软件3.0:先造好“驾驶大脑”,再考虑怎么上车
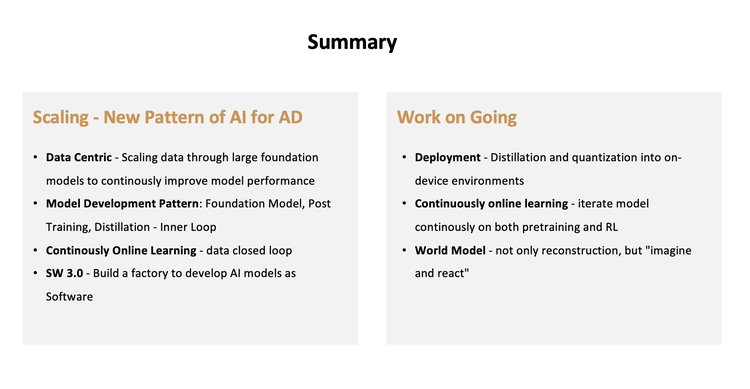
在刘先明看来,自动驾驶软件正在经历一场范式革命。从十年前靠C++ 规则堆砌的“软件 1.0”, 到引入模型来逐步替代软件、渐渐发展到“模型即软件”的“软件 2.0”,再到如今小鹏全面投入的“软件 3.0”阶段,核心理念已经发生了根本性转变,“软件3.0”时代的最大特点是用模型生产模型。
在小鹏汽车的实践中,就是先“不计成本”地把最聪明、最强大的“驾驶大脑”在云端训练出来,暂时不用考虑车上那块小芯片的计算能力。等到云端模型能力足够强大,再通过技术手段将其蒸馏成适合车端运行的版本。目前,小鹏训练的这个“完全体”基座模型,参数规模高达720亿(72B),是现在行业主流VLA模型的35倍以上。
模型背后,是一座真正意义上的“云端模型工厂:它拥有算力达10EFLOPS、上万张GPU卡的智算集群,并采用专门优化的数据传输架构,将训练速度提升了5倍。更重要的是它的“数据引擎”——一个庞大且持续运转的数据飞轮。
相比很多公司要依赖有限的公开数据集或单次采集任务,小鹏的一大优势在于,其数据采集能力“不受限制”,直接来自大规模量产车队。小鹏汽车的基座模型累计处理了超过5000万段30秒视频片段,总计超40万小时训练数据,平均每天上传数据达600TB,这些数据全都来自真实世界、真实场景。这些数据采集由超过100种触发机制驱动,确保了数据的多样性和价值。
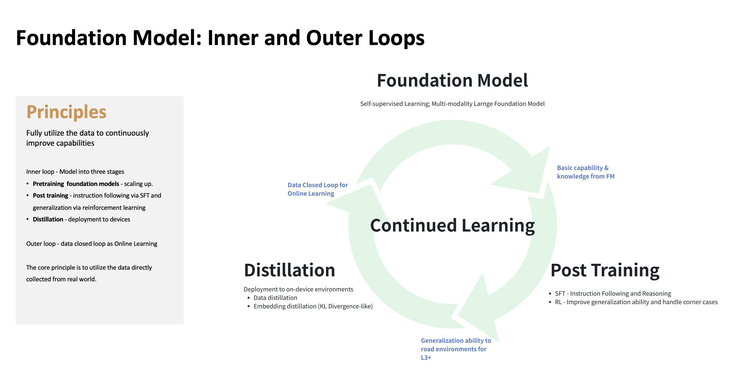
更重要的是,这些数据并非“采了就用”,而是通过一套 “内外双循环系统” 持续驱动模型进化。
刘先明在演讲中介绍,“我们的基座模型不是静态的,它在持续学习、循环进化(Continued Online Learning)。可以把模型的迭代过程分成内、外两个循环,内循环是指包含预训练、后训练(包括监督精调SFT和强化学习RL)和蒸馏部署的模型训练过程;外循环,是指模型在车端部署之后,持续获取新的驾驶数据和用户反馈,数据回流云端,继续用于云端基模的训练。”
正是这种“数据飞轮”机制,让小鹏的大模型训练始终处在动态进化状态,也为攻克自动驾驶行业长期面临的“长尾场景”难题提供了充足的数据保障。
现场观众评价小鹏汽车“软件3.0”观点。| 来源:硅星人
扩展法则铁证:为自动驾驶领域的“暴力美学”正名
支撑这套“先做大、再做小”逻辑的,是一项关键的实验结果,也是小鹏此次分享最核心的贡献之一:扩展法则(Scaling Law)在自动驾驶领域是有效的。
在语言大模型(LLM)领域,扩展法则已被反复验证,即模型性能随着计算量、数据量、参数规模增加而系统性提升。但在充满不确定性的自动驾驶物理世界里,输入是复杂的多模态信号,输出需要实时行为决策,“越大越强”是否依然是铁律?
小鹏团队此次通过大规模实验首次公开验证了这一点。
他们在CVPR展示的图表显示,当模型参数量从10亿增加到720亿,以及训练视频片段数量从100万增加到3000万时,衡量轨迹预测精准度的关键指标——纵向平均位移误差(Long ADE)——呈现出一条近乎完美的、持续下降的曲线。这意味着模型预测未来轨迹的精准度,确实随着其规模增加而系统性提升。刘先明补充道:“目前为止,我们还没有看到这个趋势出现饱和。”
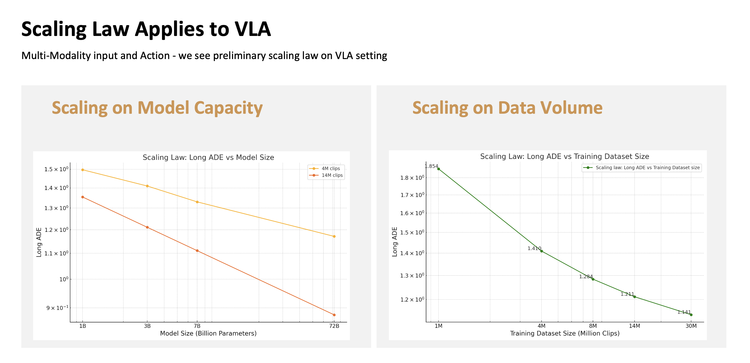
这为小鹏“软件 3.0”路线提供了强有力的数据支撑,也向整个行业证明,在自动驾驶这条赛道上,依赖“海量高质量数据+大模型驱动”,是一条清晰可见、回报确定的技术路径。
CoT链式推理 + 强化学习,教汽车“思考”怎么开
但光有规模还不够,如何让这个“大力士”拥有“绣花针”般的精细操作能力?小鹏展示了其在大模型能力塑造中的关键策略组合——链式推理(Chain of Thought, CoT)+强化学习(RL)。
这就好比是教一个新手司机成长为老司机的过程。
第一步:用CoT,让AI学会分步骤思考
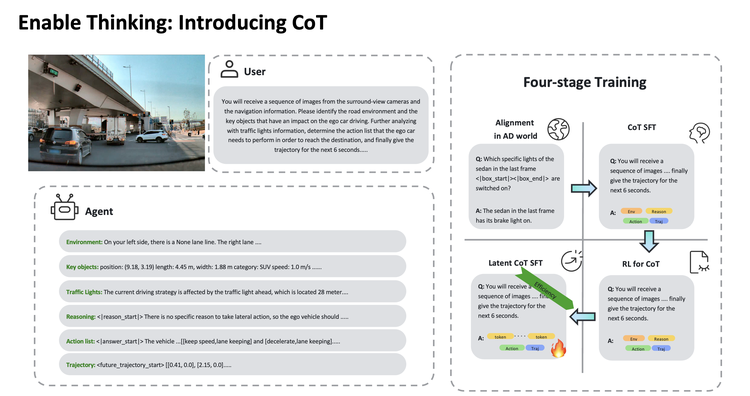
新手司机开车,往往是“看到障碍物,踩刹车”的本能反应;老司机则会在脑中进行一连串的思考:“前方有障碍,我需要减速。看一眼后视镜,右后方没车。打转向灯,平稳地向右并线绕行。”CoT正是要赋予AI这样的能力。
在模型训练中,先通过大规模图文数据建立基础语义理解;接着在监督微调(SFT)阶段引入CoT机制,让模型在做出关键决策前生成一段推理链,包括环境描述、逻辑分析和动作规划,提升可解释性和鲁棒性。刘先明说:“很多复杂场景需要分步骤思考,CoT正好赋予了模型这种思考时间。”
第二步:用RL,让AI在试错中进化
思考能力有了,但面对未知极限场景,模仿学习难以应对——“L3/L4自动驾驶很多极端情况是靠模仿学不会的,”刘先明坦言。这时RL就派上用场了。类似教孩子骑车,骑得稳有“愉悦”的奖励,快摔倒有“恐惧”的惩罚,最终在不断的试错和调整中学会。RL也是同理,通过“奖励与惩罚”机制,让模型在虚拟环境中不断试错,自主寻找最优驾驶策略。刘先明举例说:在一个U型掉头场景,未优化的模型动作僵硬,甚至可能撞上路沿;而经过RL训练后,模型会主动减速,以优雅平滑的路线完成掉头。
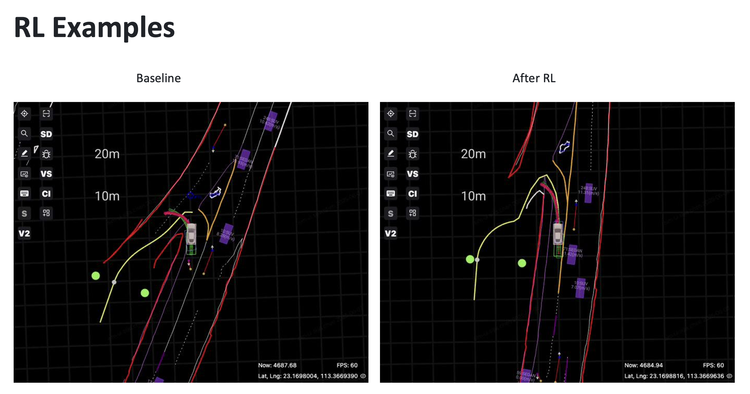
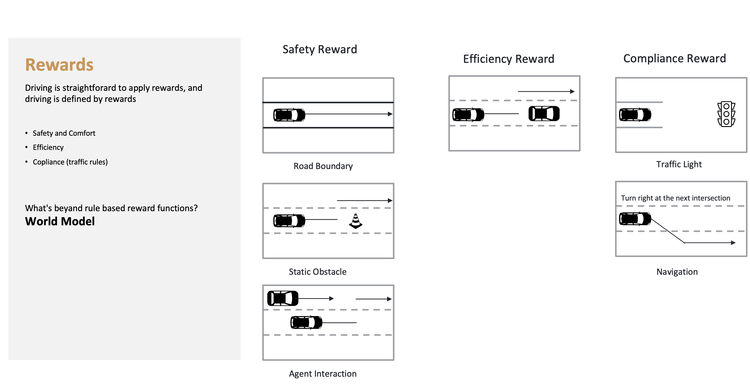
为实现这一点,小鹏打造了完整的RL训练体系,包括:Reward Function(强化安全、效率、合规驾驶能力)、Reward Model(从真实用户接管和反馈数据中学习“好驾驶”行为)、World Model(虚拟博弈环境,支持高复杂动态交互)。可以说,RL让大模型真正具备了面对复杂现实场景“悟”出解决方案的能力。
最后一公里:从云端大模型到车端自研芯片
有了这个既会“思考”、又能进化的云端大脑,下一个挑战也是最现实的问题——如何将它装进每一辆车里。
小鹏的软件解法,是通过“知识蒸馏”路径,将 720 亿参数的基座模型能力提炼为适配车端算力的小型模型。在部分实车测试中,甚至实现了未蒸馏小尺寸模型的直接控车,显著提升驾驶的平滑性与安全性。
而硬件解法,则是另一张王牌:自研芯片。就在 CVPR 举办期间的 6 月 11 日晚,小鹏正式发布其最新车型 G7——全球首款 L3 级AI汽车,首发搭载三颗自研图灵 AI 芯片。

这款芯片在性能上尤为引人注目:单颗芯片有效算力达到英伟达 Orin的三倍;三颗协同工作后的总算力达 2200 TOPS,相当于 9 颗 Orin-X 的效能。集成小鹏自研智驾系统后可实现接近 100% 的算力利用率(相比通用芯片约 70%–80%),最高可在本地实时运行 300 亿参数大模型,为高阶自动驾驶提供了充足的冗余能力。
这块强大的端侧基石,配合小鹏云端具备5天一轮迭代能力的“云端工厂”,以及年内将突破2亿clips的训练数据目标,最终构建出了一套“云端训练-车端部署、软件定义-硬件优化”的自循环完整技术路径。
结语:一份来自真实世界的行车报告
小鹏汽车的这场CVPR分享,并没有太多华丽辞藻。它更像一位资深研发员摊开设计图与实验数据,向同行们细致讲述团队是如何一步步解决问题的。从验证Scaling Law,到拆解“思考型”模型的训练细节,再到公布软硬一体的部署方案,小鹏带来的是一套完整的、在真实世界里跑出来的工程体系。
更重要的是,它打破了“学术→工业”单向传导的惯性,展示了工业界如何通过海量真实数据、扎实工程实践,反哺学术探索、为物理世界AI打开全新可能性。
当理论照进现实,那些来自道路的真实挑战和数据,正在定义着自动驾驶的下一程。


(文:硅星人Pro)