
风湿患者的日常抓握困境,或许将被这一创新手套所改变。北京航空航天大学文力教授团队近期在Advanced Science期刊发表的研究成果,为那些饱受风湿性疾病困扰的患者带来了新的希望。

这款创新手套不依赖传统外骨骼的机械驱动,而是巧妙利用热响应离子凝胶的粘附特性,使患者能够轻松抓起各种物品。更重要的是,整套系统仅重47克,让辅助设备的便携性提升到了新高度。

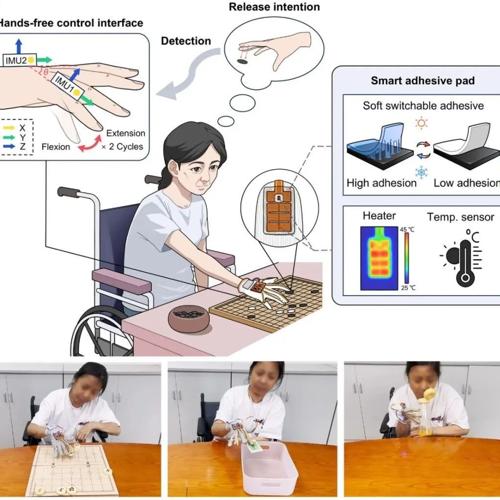
图1. 系统概述。a) 示意图显示了带有软可切换粘合剂的便携式抓握辅助手套的整体配置和应用。b) 一名患有手部损伤的风湿性患者使用手套执行ADL任务的代表性图像,包括下棋、拿起学生卡和拿瓶子喝水。
▍风湿患者的“巨大需求“
风湿性疾病是一组主要影响肌肉骨骼系统的慢性自身免疫性疾病,包括类风湿性关节炎、系统性红斑狼疮等。这些疾病影响着全球约5%的人口,且近年来发病率和患病率都在上升。
如果不能及时治疗,类风湿性关节炎和强直性脊柱炎等疾病会导致高达75%和37%的患者出现关节畸形,从而导致残疾和劳动力损失。其中,周围神经病变是一种常见并发症,发生在高达50%的类风湿性关节炎患者身上,严重限制了患者的日常生活能力。
针对这一问题,科研人员一直在探索手部辅助可穿戴机器人的开发。传统解决方案主要分为两类:刚性可穿戴手外骨骼和软性可穿戴辅助手套。刚性手外骨骼通常体积庞大且沉重,由电机驱动的刚性连杆机构组成。而且因为外骨骼的刚性关节和自然手指关节之间的错位,经常导致使用者受伤。
软性可穿戴辅助手套虽然提供了更轻的重量和更高的安全性,但仍需要外部硬件(如泵+管、电机+电缆)来驱动,使整个系统变得复杂沉重。更关键的是,这些设备的工作原理涉及施加外力使手指围绕物体弯曲,这对于患有关节炎等疾病的人来说可能会引起不适或疼痛。
在传统辅助设备面临诸多局限的情况下,北航文力教授团队转向自然界寻找灵感,并最终开发出了这款基于粘附原理的智能手套。
▍向自然学习:手生物启发的粘附抓握
自然界中,生物的抓握机制主要依赖于三种基本原理:机械联锁、摩擦和粘附。人类的手主要依靠前两种机制,而章鱼、树蛙和壁虎等生物则利用粘附力进行抓握。
基于粘附的抓取只需要最小的预载荷就能产生显著的粘附力,从而消除了抓取和操纵物体时需要相当大的闭合力。此外,由于粘附力垂直于物体表面,因此可以采用额外的处理策略,例如单点抓取,这是基于机械联锁和摩擦的人手无法实现的。
这些特性理论上可以使手部残疾患者实现简化的抓握过程和更高的提升力,而不需要手指上的外部驱动力。基于这一思路,北航团队设计了一款基于热响应离子凝胶的轻便、便携、柔软、可穿戴的粘性手套,旨在增强风湿患者的抓握功能。
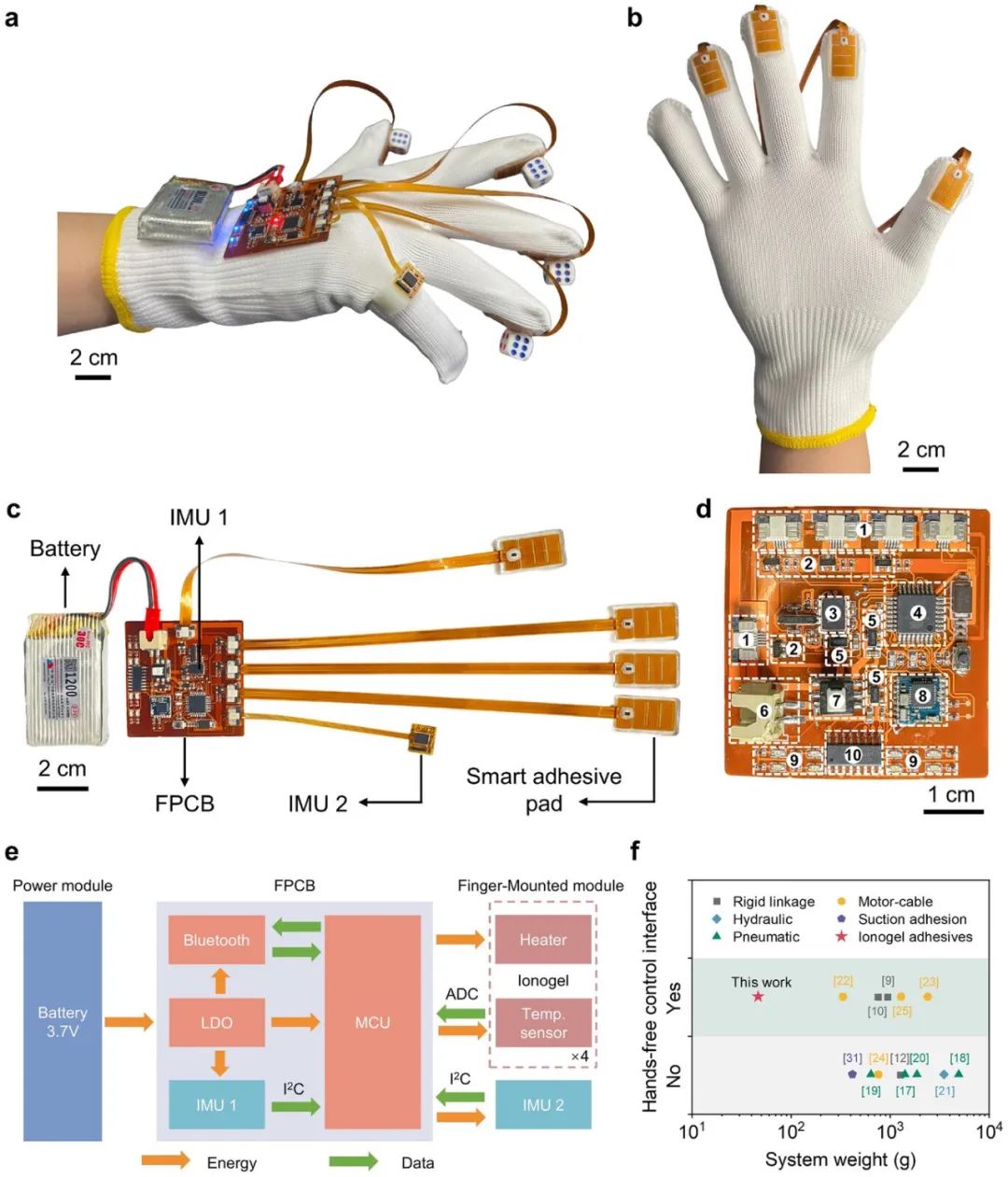
图2. 便携式抓握辅助手套的整体设计,带有可切换的软粘合剂。a) 所提出的可穿戴粘性手套的侧视图。b) 帕尔马提出了可穿戴粘性手套的观点。c) 全集成电子系统的光学图像。d) FPCB的照片。白色虚线框表示主要集成电路元件的位置。1.FPC连接器。2.NMOS晶体管。3.IMU。4.单片机。5.LDO。6.3.7 V锂聚合物电池。7.开关。8.蓝牙。9.LED。10.模拟开关。e) 所提出的机器人手套的电子系统的框图。f) 各种可穿戴辅助手套的控制界面和系统重量的比较。所提出的柔软可穿戴粘性手套具有免提控制界面和最轻的系统重量(47克)。
这款手套的核心是一种离子凝胶,在25°C下表现出高粘附性(对各种材料的粘附力约35 kPa),而在45°C下则显示出低粘附性(约6.8 kPa)。通过嵌入式柔性加热器和温度传感器对离子凝胶的温度进行闭环控制,手套能够提供可编程的粘合能力。在4V电压下,仅需4秒就能实现从高粘附到低粘附的快速切换。
更巧妙的是,该系统还配备了基于惯性测量单元(IMU)的免提控制界面,能够检测用户的释放意图,便于轻松直观地拆卸物品。整个手套系统仅重47克,比现有的辅助手套轻7.2倍,大大提高了便携性和使用舒适度。
▍热响应离子凝胶:可切换粘附力的秘密
这款手套的核心创新在于使用热响应离子凝胶作为粘附材料。该凝胶在不同温度下表现出显著不同的粘附特性,是实现可控抓握的关键。
研究团队设计的离子凝胶在室温(25°C)下呈现高粘附状态,能够轻松粘附各种材料表面。而当温度升高到45°C时,凝胶的粘附力显著降低,实现了对物体的释放。

图3. 具有可切换粘附力的热响应离子凝胶的设计、机理和表征。a) 具有可切换粘附力的热响应离子凝胶的拟议机制。左图:25°C下离子凝胶盘的照片和离子凝胶表面的光学显微镜图像。中间:显示离子凝胶的热响应粘附切换机制的示意图。右图:45°C下离子凝胶盘的照片和离子凝胶表面的光学显微镜图像。b) 具有60、65和70重量%的离子凝胶的温度依赖性粘附强度PBA含量对玻璃基板的影响。c) 65重量%的离子凝胶的粘附强度PBA含量在不同温度下对各种基材的影响。d) 离子凝胶在25至45°C之间对玻璃基板的循环粘附试验。e) 接触时间对离子凝胶在高温和低温下对玻璃基板的粘附强度的影响。f) 预加载对离子凝胶在高温和低温下与玻璃基板粘附强度的影响。g) 离子凝胶的热响应粘附切换可在各种基材上使用。
▍智能控制系统:温度监测与意图检测的结合
要实现真正实用的辅助手套,仅有好的材料是不够的,还需要精确的控制系统。北航团队在这方面也做了创新设计。
手套中的粘合垫集成了柔性加热器和温度传感器,形成了一个闭环控制系统。通过PID控制算法,系统能够精确控制粘合垫的温度,使其在需要抓握时保持低温高粘附状态,需要释放时快速升温至低粘附状态。
研究显示,在4V电压下,粘合垫可以在4秒内实现从高粘附到低粘附的快速切换。即使在弯曲和扭曲状态下,这些智能粘合垫仍能保持良好的加热和温度监测性能,这对于适应手指的复杂动作至关重要。
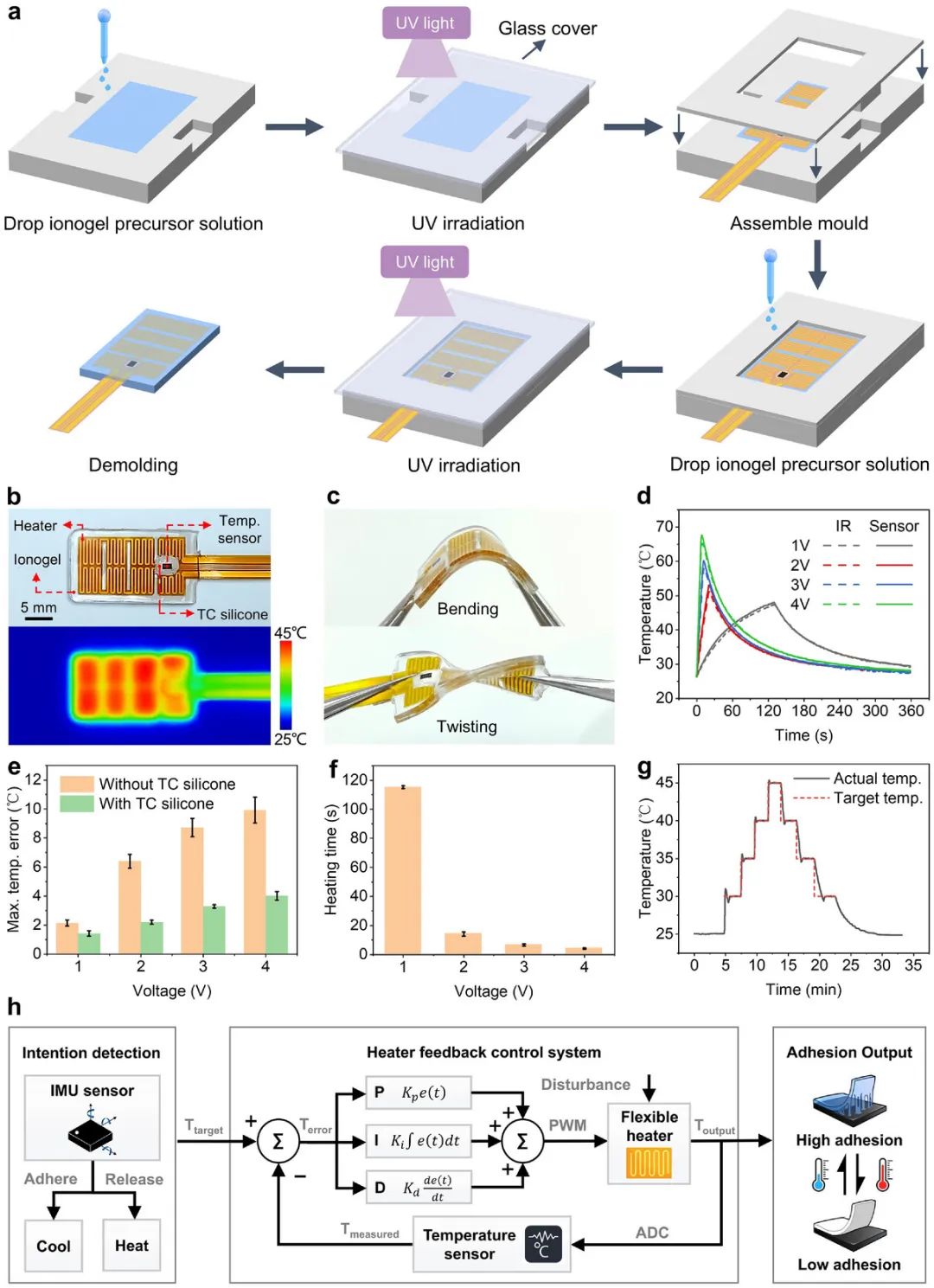
图4. 智能粘合垫,内置柔性加热器和原位温度传感器。a) 智能粘合垫制造步骤示意图。b) 智能胶垫的光学图像和红外摄像头图像。c) 智能粘合垫在弯曲和扭曲下的照片。d) 通过原位温度传感器和红外摄像头在不同施加电压(1、2、3和4 V)下测量的智能粘合垫的温度变化。现场温度传感器记录的温度轨迹(实线)与红外图像(虚线)中的数据非常一致。e) 在各种电压下从室温加热到45°C期间,使用和不使用导热硅的原位温度传感器与红外摄像头之间的最大温度误差。f) 智能粘合垫在不同施加电压下通过柔性加热器从室温(25°C)加热到45°C所需的加热时间。g) 智能粘合垫的随时间变化的温度分布,由PID控制器在环境温度(25°C)下逐步调节温度。h) 闭环温度控制的PID控制方案。
除了温度控制外,系统还基于IMU的免提控制接口进行手释放意图检测。当用户连续两次伸展和弯曲小指时,系统会自动触发分离过程。
这种免提控制接口极大地简化了使用过程,使患者能够直观地控制手套,无需额外的操作界面或复杂的学习过程。测试表明,即使在高速运动(高达800°/s的转速)下,IMU测量的角度仍保持较高的准确性,确保了手势识别的可靠性。
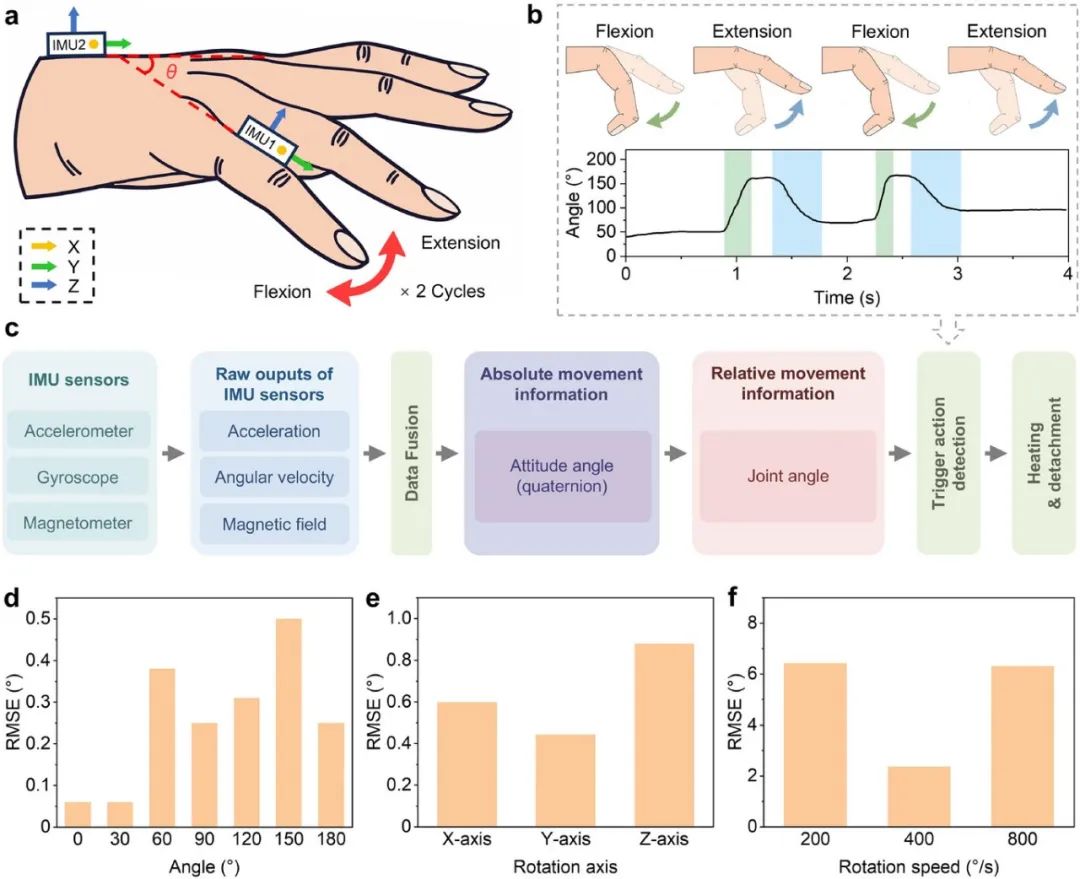
图5. 通过基于IMU的免提控制接口进行手释放意图检测。a) 小指的IMU方向和关节角度。b) 分离触发机制。小指连续两次伸展和弯曲会触发分离。c) 用于检测用户意图的数据处理步骤的示意流程图。d) IMU估计角度和地面真实静态角度之间的RMSE。e) 在两个IMU都固定在90°角并以100°/s的角速度围绕x、y和z轴旋转的条件下,参考角度和测量角度之间的RMSE。f)伺服电机提供的参考角度和IMU在200、400和800°/s的转速下测量的参考角度之间的RM SE。
▍临床验证:重获日常生活能力
理论和实验室测试之外,这款手套的真正价值体现在对风湿患者的实际帮助上。
研究团队邀请风湿性疾病患者测试这款辅助手套,结果令人振奋。在没有手套辅助的情况下,受试患者无法完成许多基本日常任务,如拿起水瓶、拾取硬币、下棋等。而在佩戴手套后,这些任务都能够顺利完成。
以饮水任务为例,在没有手套帮助的情况下,患者完全无法抓握水瓶。而在手套的辅助下,患者能够抓起水瓶,喝水,然后通过简单的小指动作触发释放功能,将水瓶放回桌面。
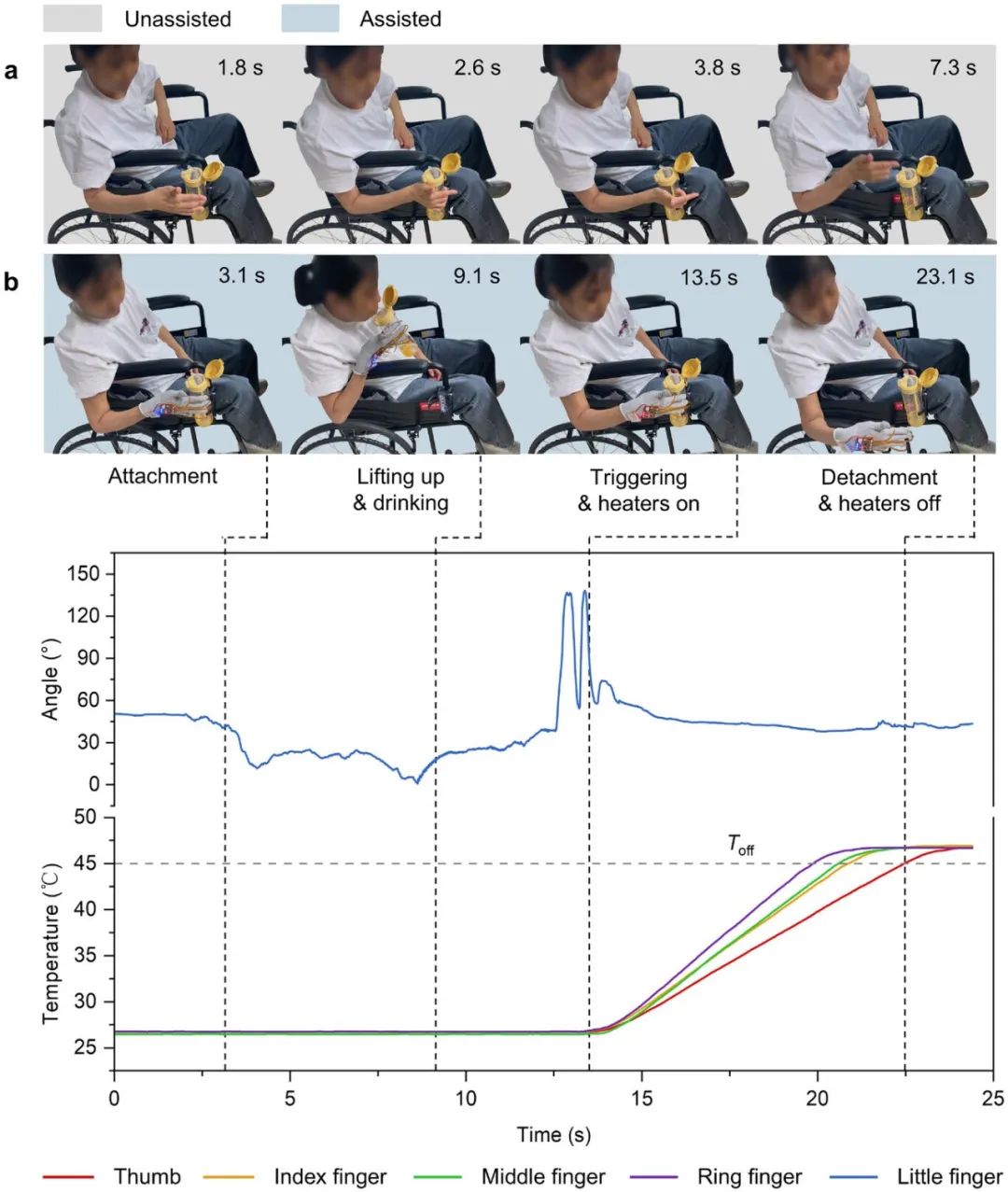
图6. 风湿患者在没有手套的情况下和在手套的帮助下完成饮酒任务的示例。a) 选定的快照图像显示,如果没有手套的帮助,患者无法拿起水瓶。b) 演示患者在手套的帮助下抓握、提起、饮水和释放水瓶。下面的曲线显示了在此过程中小指角度和其他手指智能粘合垫温度的实时测量值。

图7. 风湿性疾病患者在无辅助(无手套)和辅助(有手套)条件下执行的不同模拟ADL任务。a) 拿起一枚硬币,把它放进一个钱罐里。b) 下棋杀死对手。c) 拿起一把金属勺子,把它放进餐具架里。d) 抓住瓶子,用吸管喝瓶子里的果汁,然后把它放回桌子上。抓住各种不同形状和大小的物品并将其放入储物盒中:e)学生卡,f)垒球,g)金属盒,h)手机。没有手套的帮助,受试者无法完成任务,而在手套的帮助下,受试器可以完成任务。
研究还测试了多种不同形状和大小的物品,包括学生卡、垒球、金属盒和手机等。结果显示,这款手套对各种物体都表现出良好的抓握能力,大大拓展了患者的活动范围。
这项研究为风湿性疾病患者提供了一种全新的辅助解决方案,不仅技术创新,而且切实解决了患者的实际需求。随着进一步的优化和推广,这款热响应离子凝胶粘合手套有望帮助更多手功能障碍患者重获日常生活的独立性。
(文:机器人大讲堂)