
顶刊发布上海交大两栖粘附磁驱微型机器人:小尺寸大作用的创新成果
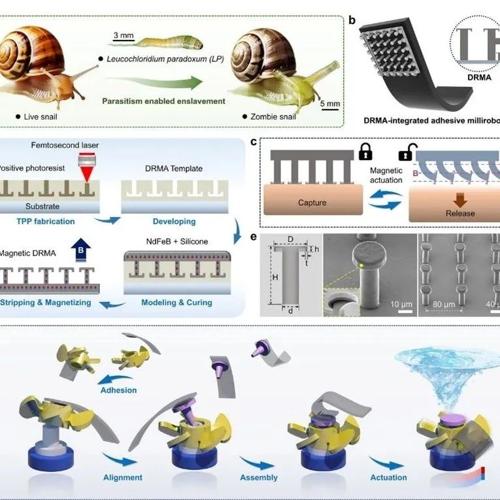
上海交通大学团队开发出一种两栖粘附磁驱微型机器人,能够在空气和水中自如切换并操控多种目标。该研究发表于《Advanced Materials》期刊,提出利用双折返微阵列结构实现可靠粘附力,并展示其在干湿环境中的应用优势及多模态运动控制能力。
上海交通大学团队开发出一种两栖粘附磁驱微型机器人,能够在空气和水中自如切换并操控多种目标。该研究发表于《Advanced Materials》期刊,提出利用双折返微阵列结构实现可靠粘附力,并展示其在干湿环境中的应用优势及多模态运动控制能力。