
小型厘米级机器人,可在工业设施、天然洞穴、灾难废墟等狭小缝隙自由穿行,执行那些大型机器人难以触及的检查和探索任务。同时,由于使用更廉价的材料且用量少,小型厘米级机器人在大规模部署时展现出经济高效的特性。凭借这些独特优势,小型厘米级机器人正在机器人领域逐渐崭露头角。

UC Berkeley研发全球最小可控无线飞行机器人
但与此同时,小型机器人也正在面临硬件限制的挑战。受尺寸的限制,小型机器人通常缺乏足够的感知、驱动和控制资源,难以在运动过程中提供主动动态稳定性。执行器数量、功率密度和精度的限制直接导致机器人稳定性和机动性的不足。此外,在非平坦地形上,小型机器人难以有效且高效地移动,这进一步限制了它们的应用范围。
在提升机器人稳定性和机动性的设计思路中,多足设计虽在一定程度上发挥了作用,但同时也带来了复杂性和占用空间的问题。相比之下,双足机器人虽然设计更为简洁,但在小型化过程中却面临更大的挑战。如何在保持双足行走特性的同时,实现机器人的小型化、稳定性和高效性,成为了当前亟待解决的问题。
▍身高仅3.6cm,推出最小独立式双足步行机器人Zippy
在人形机器人设计领域,双足机器人因其与人类相似的行走方式而备受关注。然而,传统的双足机器人设计通常需要大量的执行器、高精度传感器和复杂机构,这使得它们难以在小型化过程中保持高效和稳定。被动动态步行器(PDW)的出现为研究人员提供了新的思路。PDW利用机器人的被动动力学特性,在无需任何驱动的情况下实现周期性行走循环。
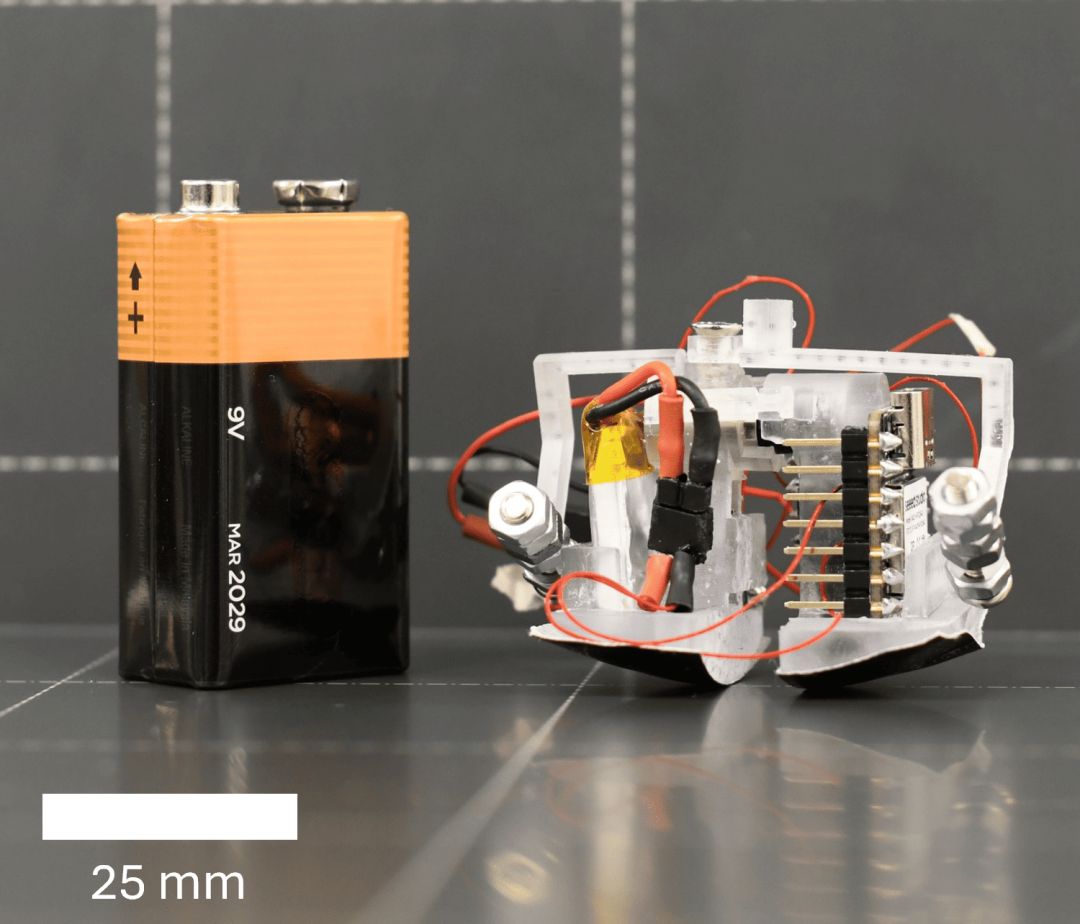
受此启发,卡内基梅隆大学机器人力学实验室的研究团队提出了身高仅3.6厘米的准被动双足步行机器人Zippy。这也是目前最小的独立式双足步行机器人。与卡内基梅隆大学此前推出的全球首个单驱双足机器人Mugatu类似,Zippy有圆形的脚和一个臀部的无反馈控制的单电机,但尺寸却大幅缩小。
在小型机器人领域,动态稳定性的挑战本就巨大,而Zippy成功克服了这一难题,成为独立式小型机器人中唯一的双足机器人。它不仅能被动站立无需驱动,还具备转弯、跳跃和上台阶等多种能力。在速度方面,Zippy最快前进速度可达25厘米/秒,相当于每秒10个腿长,这一速度使其成为相对于其腿长(或非直腿机器人的臀部高度)最快的自主双足机器人,与此前4.1Cassie保持的每秒腿长记录相当。
研究过程中,研究团队还提出了一种“跳跃步态”,其短暂的腾空阶段可以增加摆动腿的间隙,这使得团队能够重新审视现有的设计规则,并对大型准被动步行器进行改造,以提高其速度和稳定性。为了评估机器人的转弯能力、在不平坦地形上的表现以及能源效率,研究团队还进行了实验测试,以检验Zippy作为小型运动平台执行检查或搜索救援等重要任务的可行性。实验结果表明,Zippy具备出色的能源效率和地形适应性,能够在不平坦的地形上稳定行走。
据卡内基梅隆大学机器人力学实验室透露,该研究成果将在2025年IEEE国际机器人与自动化会议上正式发表。那么,Zippy机器人具体是如何实现的呢?接下来,和机器人大讲堂一同深入了解~
▍探秘Zippy背后,最小独立式双足步行机器人如何设计与制作?
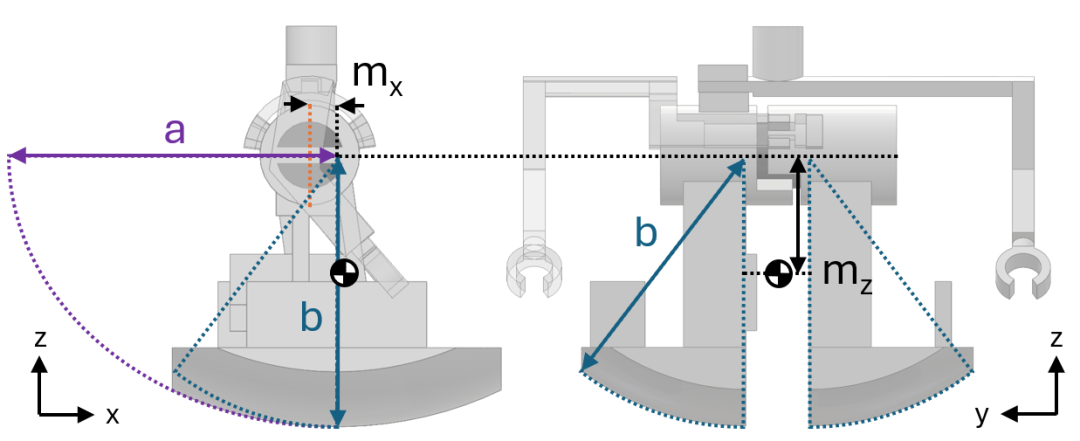
Zippy机器人的设计并非凭空而来,它以最简单的步行机器人Mugatu为基础。Mugatu作为只有一个执行器的双足步行机器人,其五条设计规则为Zippy的初始设计提供了关键指引:重心必须位于脚部半径的曲率中心下方;臀部的垂直位置必须位于脚半径的曲率中心上方;在矢状面上,髋轴的位置一定位于重心后方;两脚之间必须有一个横向间隙,曲率切线在地板上;施加的扭矩和惯性必须足以克服启动时的摩擦。这些规则为Zippy的设计奠定了理论基础,确保了其在后续研发过程中的稳定性和可行性。
全球首个单驱双足机器人Mugatu
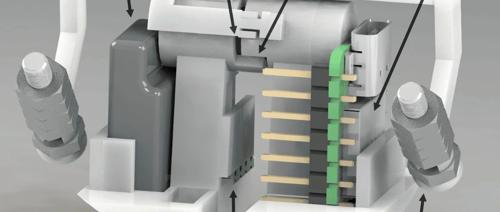
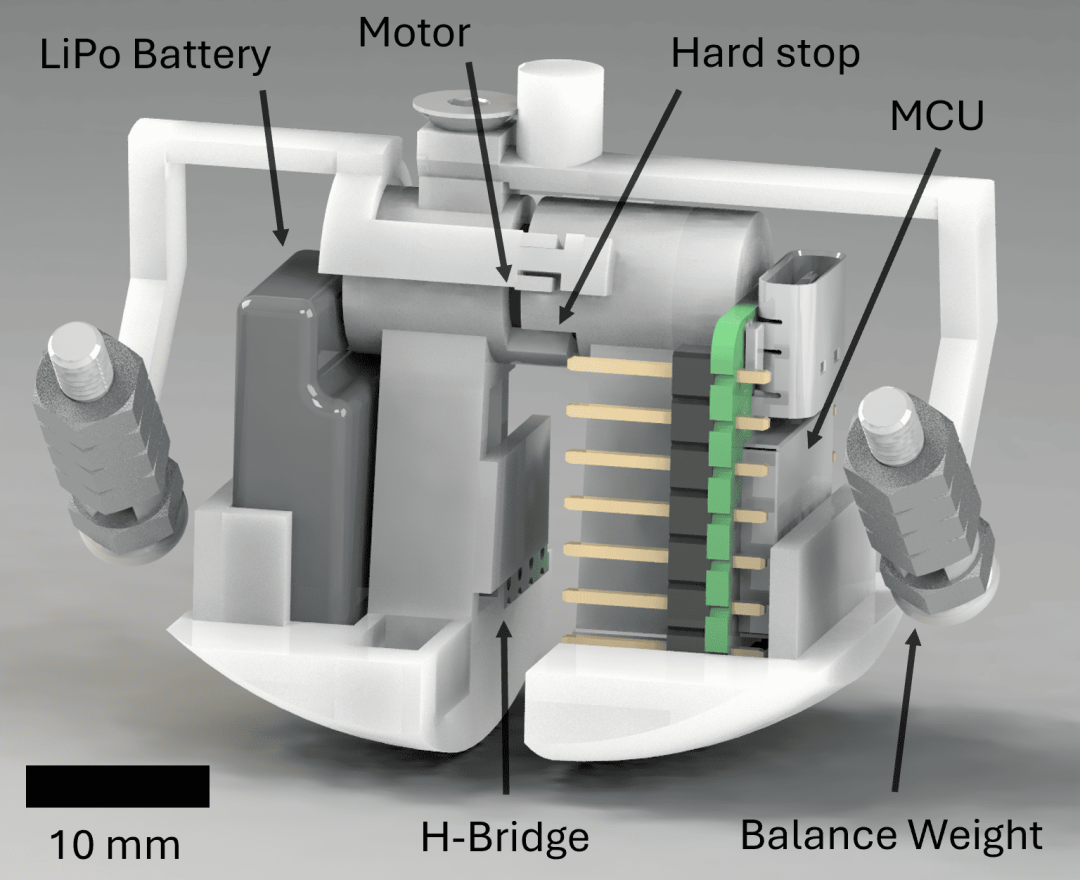
在硬件设计方面,Zippy由两个刚性身体组成,每个身体包含一条腿、一个弯曲的脚和一个手臂,这些部件均通过3D打印技术制成,并在臀部由一个单开环直流电机连接。这种设计不仅简化了机器人的结构,还降低了制造成本。在动力供应方面,Zippy使用微控制器板通过H桥驱动电机,由锂聚合物电池供电,为机器人的运动提供了稳定的能量来源。此外,模块化紧固件充当手臂上的平衡重量,能够有效抵消偏航力矩,并提高抬起前进腿的能力。为了增强机器人的行走稳定性,研究团队还在脚底粘贴了胶带,以提高摩擦系数,避免因摩擦力不足而出现粘滑现象,或因摩擦力过大导致能量损失过多而原地踏步。
值得一提的是,弯曲的脚部是Zippy实现被动稳定性的关键设计。足部在额叶和矢状面的曲率对步态生成有着极大影响,研究团队为此评估了两种足部形状。最初,他们等距缩放了Mugatu的球形足部,但在测试中发现,这种设计因过度滚动和俯仰导致机器人行走不稳定。随后,团队将脚部修改为椭圆形轮廓,降低了矢状面的足部曲率,并将椭圆体中心提升至臀部高度。通过对比机器人身体在运动过程中的滚动和俯仰幅度,研究团队最终证明了椭圆形足部设计的优越性,为Zippy的稳定行走提供了有力保障。
在控制方面,小型机器人执行器尺寸缩小带来了精确电机控制的难题。这不仅要求将所需的传感元件集成到紧凑的平台上,还需应对小尺寸下更高频的干扰问题。与大多数被动动态行走机器人采用设定电机位置设定点作为驱动信号,并通过伺服比例-微分(PD)控制确保关节轨迹准确跟踪的方式不同,在研究团队设计的行走机器人尺寸下,由于小型电机-编码器组件设计难度较大,闭环伺服控制的实施变得极为棘手。
鉴于此,研究团队最终为Zippy采用了开环控制策略来调控机器人的步态,并辅以物理硬限位装置来严格限制其运动范围。具体实现上,研究团队将方波电压施加于髋关节电机,通过调节方波的振幅、频率和直流偏移量来控制机器人前行速度与转弯半径,并利用蓝牙远程传输波形参数启动机器人。硬限位装置在这一过程中起到了至关重要的作用,它确保髋关节在预定范围内运动,避免了电机频繁正反转带来的不稳定和能耗增加,有效提高了机器人行走的稳定性和效率。
▍进行实验测试,评估最小独立式双足步行机器人Zippy行走性能
为了评估Zippy的行走性能,研究团队设计了严格的实验设置。通过部署高速摄像头同步采集矢状面与冠状面视角数据,团队量化分析了机器人在不同驱动参数下的侧倾与俯仰振荡幅度。此外,团队还通过调整电压振幅和步频组合,进一步探究驱动参数对运动效能的影响。
行走性能评估围绕前进速度、转向能力和地形适应性三大核心指标展开。
在前进速度测试中,研究团队通过调整电压振幅(1.75V-3.2V)与步频(2.5Hz-12.5Hz)组合,深入探究驱动参数对运动效能的作用机制。
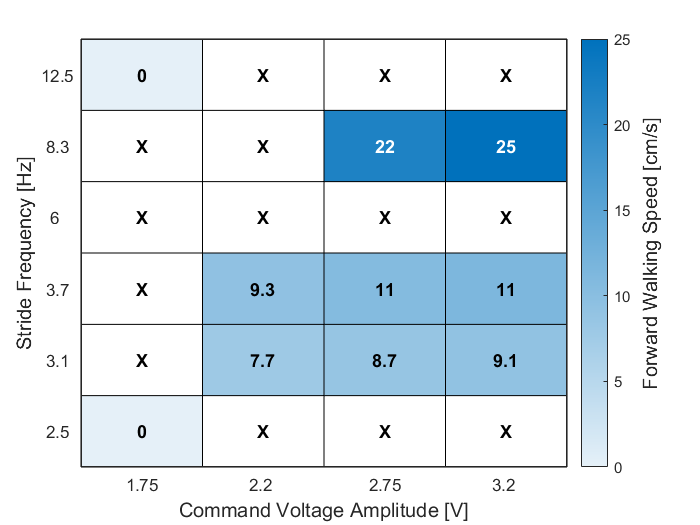
机器人的行走速度与电机电压幅度和频率的关系。“X”表示在施加相同驱动信号的情况下,机器人仍随机转弯的试验。0厘米/秒步行速度对应于机器人无法前进的试验。
实验结果显示,Zippy的最高速度可达25cm/s(3.2V振幅,8.3Hz频率)。在3.1Hz-8.3Hz区间内,步频与电压呈正相关关系,但当驱动频率与机器人自然动力学失配时,会导致步态混乱。
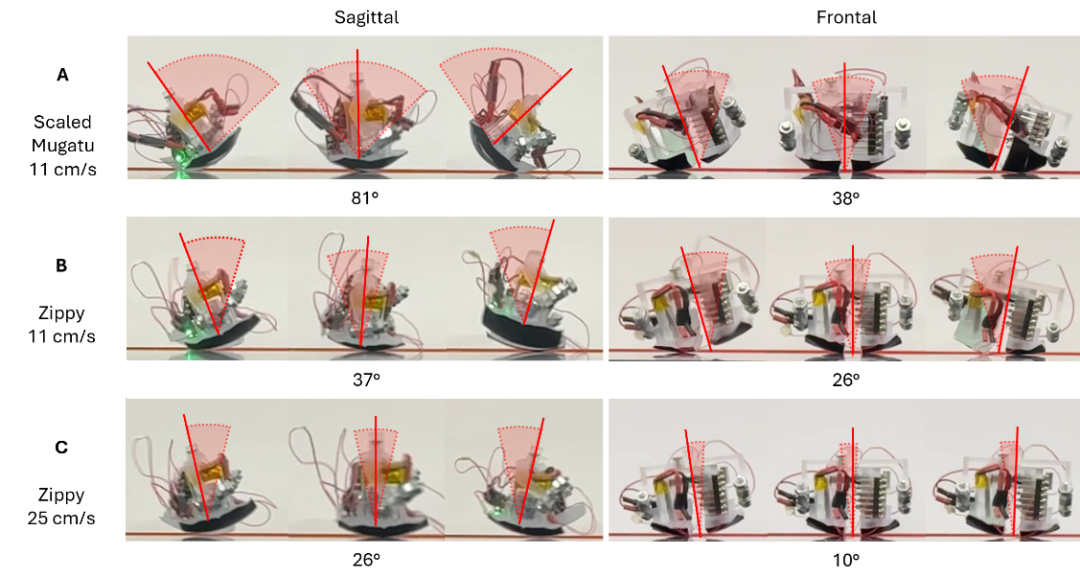
矢状面(俯仰)和额状面(滚动)振动幅度:(A)缩放 Mugatu 行走在11厘米/秒,(B)Zippy 步行11 厘米/秒和 (C) Zippy 行走在二十五 厘米/秒。
值得关注的是,在高频运动(8.3Hz)下,硬限位撞击会触发短暂腾空阶段,形成跳跃步态,这一独特步态显著提升了机器人的推进效率。

Zippy穿越的关键正面画面二十五厘米/秒当摆动腿撞击硬停时,显示短暂的空中阶段
转向能力测试环节,研究团队在2.6V振幅、3.7Hz频率基础波形上叠加±0.6V直流偏移量,测试七组偏移参数对转向半径的影响。通过最小二乘圆拟合算法提取轨迹曲率,实现了对转向性能的量化评估。实验表明,通过调整直流偏移量改变步长,Zippy能够实现可控转向,且最小可实现4.8cm曲率半径的急转弯,左右转向性能对称,展现出良好的转向灵活性。
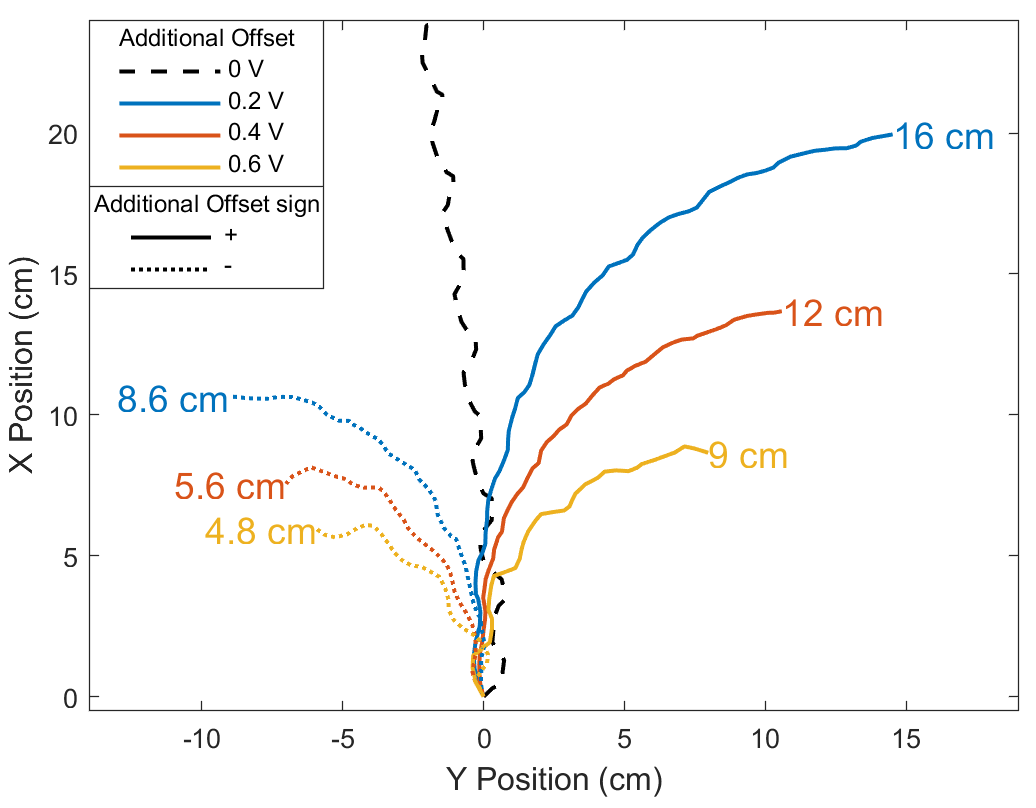
当提供不同的命令电压波形附加直流偏移量时,不同曲率半径下的机器人平均转弯轨迹(每个转弯半径进行 3 次试验)
地形适应性测试是此次评估的重点之一。Zippy需要在3D打印台阶(1mm-3mm)与随机分布棱柱地形(5.3mm边长,16mm平均高度)中,验证通过开环控制实现稳定运动的能力。数据采集系统采用固定安装的iPhone14Pro摄像头,利用物体识别算法提取运动轨迹。为确保实验数据的准确性,实验前确保电池满充,视频录制与机器人启动严格同步,有效消除了初始状态误差。最终,Zippy成功跨越2mm台阶(腿长8%)并稳定下行3mm台阶(腿长12%),在随机棱柱地形中平均速度达16.7cm/s,且未发生倾倒。这一结果表明,其椭圆形脚部设计有效限制了前后摇晃,显著提升了机器人在复杂地形中的通过能力。
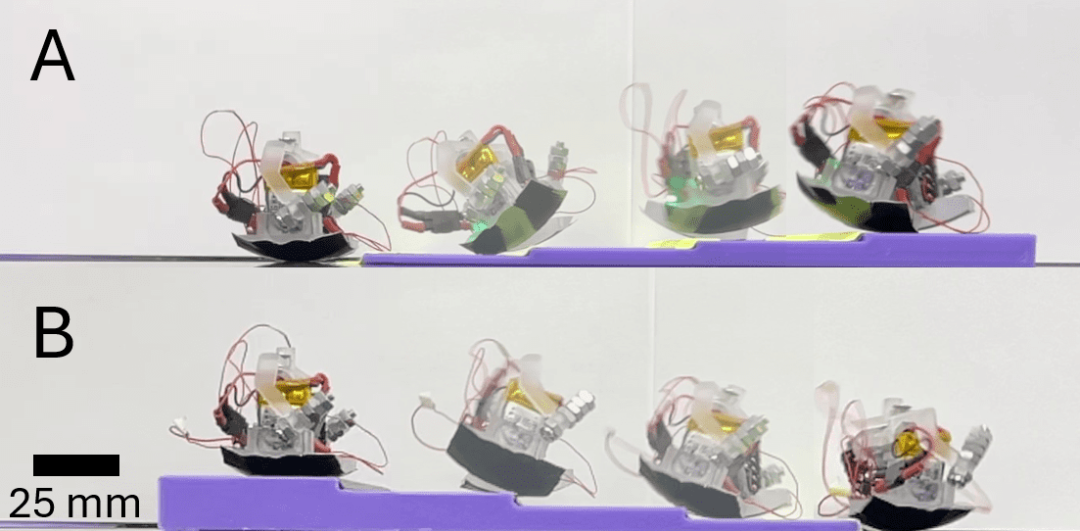
(A)机器人成功走上台阶高度为2 毫米(B)走下台阶高度为3 毫米同时保持稳定。
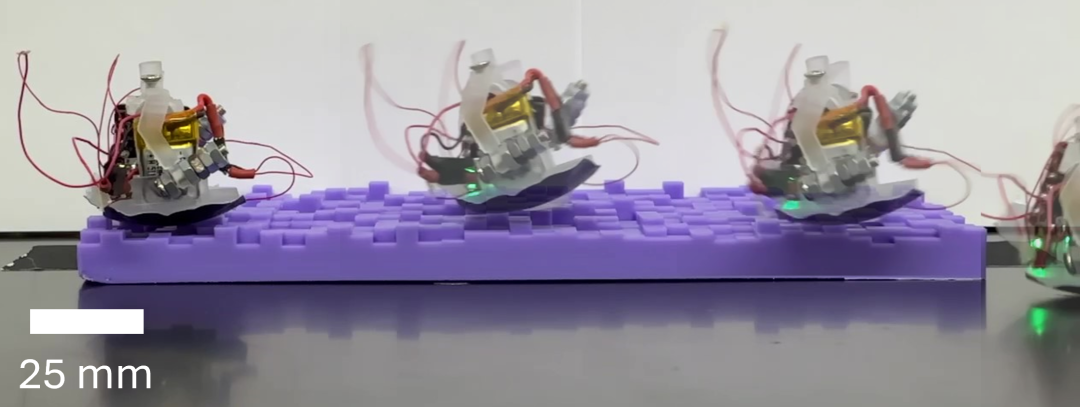
机器人成功行走的关键帧20厘米随机障碍地形(5.3 毫米经过5.3 毫米高度标准差为2.5 毫米) 在1.2 秒。
针对小型机器人能源受限的特性,研究团队采用运输成本(CoT)指标量化能量效率。在18.5cm/s速度下,Zippy的最低CoT值为11.2。同时,降低驱动频率与电压会导致CoT显著上升。全速运行测试表明,机器人可持续工作54分钟,充分验证了其设计的高效性。
▍关于未来
Zippy的出现,为小型机器人的设计与制造开辟了全新的思路。它证明了通过缩小被动动态步行原理的应用规模,能够打造出紧凑、灵活且具备稳定运动能力的机器人。这一成果对于在狭窄或危险环境中执行任务具有重要潜在价值,有望为相关领域带来新的突破。
当然,Zippy也存在一些局限性。由于采用开环控制策略,缺乏传感器反馈控制,Zippy更容易受到偏航角干扰的影响,需要精确的参数调整才能实现直线行走。并且虽然Zippy能够应对小步幅和不平坦的地形,但在遇到更大障碍物等更具挑战性的环境时,其性能会有所下降。
展望未来,研究团队已制定了明确的改进计划。他们计划利用机器人上现有的惯性测量单元(IMU)作为微控制器板的一部分,集成闭环反馈。通过来自IMU的数据,实现实时步态调整,从而提高转弯稳定性和抗干扰能力。此外,集成微控制器摄像头附件可实现基于视觉的导航和离线路径规划。凭借这些定位功能,多个Zippy机器人可以并行部署,协同组成蜂群,在狭窄或危险的环境中执行巡检和搜救任务。我们有理由相信,在不断的研究与改进下,以Zippy为代表的小型双足机器人将在未来的机器人领域中发挥越来越重要的作用,为更多行业带来创新性的解决方案。
参考文章:
https://arxiv.org/html/2505.05686v1
(文:机器人大讲堂)