


在人工智能领域,具身智能(Embodied Intelligence)一直是连接虚拟与现实的关键桥梁。它要求智能体通过感知、推理和行动与物理环境动态交互,以完成复杂任务。然而,传统具身智能模型在复杂任务中面临多模态交互与长时序推理、动态环境适应性等核心挑战。近期,由浙江大学、中科院软件所和阿里巴巴达摩院联合推出的 Embodied-Reasoner 模型,为这一领域带来了突破性进展。本文将从技术架构、核心创新、性能表现及应用场景等维度,深入解析这一突破性成果。
一、项目概述
Embodied-Reasoner是由浙江大学、中科院软件所和阿里巴巴达摩院等机构联合提出的一个开源的多模态具身模型。它能够将深度推理能力扩展到具身交互任务中,处理复杂的具身任务,例如在 AI 2-THOR 模拟器中搜索隐藏物体、操纵和运输物品等。该模型通过整合视觉搜索、深度推理与动态规划能力,显著提升了具身任务的执行效率与成功率,甚至超越了 OpenAI 的 o1 和 GPT-4o 等先进模型。Embodied-Reasoner 不仅能够自主观察环境、探索房间并找到隐藏物体,还能通过深度推理解决复杂问题,为具身智能领域提供了一种全新的解决方案。

二、技术原理
(一)数据引擎
Embodied-Reasoner 通过任务模板和场景元数据自动生成高质量的任务指令,同时记录完整的“观察–思考–行动”轨迹,包含丰富的思考过程和交互图像。该数据引擎能够合成多样化的多模态思维链,覆盖 107 种多样化的室内场景,涉及 2,100 个交互对象和 2,600 个容器。这种数据生成方式确保了模型在训练过程中能够接触到丰富多样的任务场景,从而提升其泛化能力和适应性。
(二)三阶段训练
Embodied-Reasoner 采用三阶段训练流程,逐步增强模型的交互、探索和反思能力:
1. 模仿学习:基于合成轨迹进行微调,掌握基本的交互技能。
2. 自我探索(拒绝采样):通过采样与评估生成新的轨迹,持续优化模型的探索能力。
3. 自我修正(反思调整):通过注入异常状态和执行反思机制,及时发现并修正错误,显著提升模型的自适应能力。
(三)多模态交互
该模型结合视觉输入(图像)和语言输出(思考过程与动作指令),实现高效的人机环境交互。这种多模态交互能力使得模型能够处理长序列的图像–文本交互上下文。例如,在寻找物品的任务中,模型能够通过视觉输入识别环境中的物体,并通过语言输出描述其推理过程和行动计划。
(四)推理机制
Embodied-Reasoner 基于生成式的长思考序列,模拟人类的深度推理过程,显著增强模型在复杂任务中的表现。其推理机制包括分析、空间推理、反思、规划和验证等多种模式。例如,在面对一个需要多步骤完成的任务时,模型能够逐步分解问题,规划行动步骤,并在执行过程中不断反思和调整策略。
三、性能表现
(一)任务完成情况
Embodied-Reasoner 在多个关键指标上均展现出卓越的性能,全面超越了多个先进模型。具体表现如下:
-
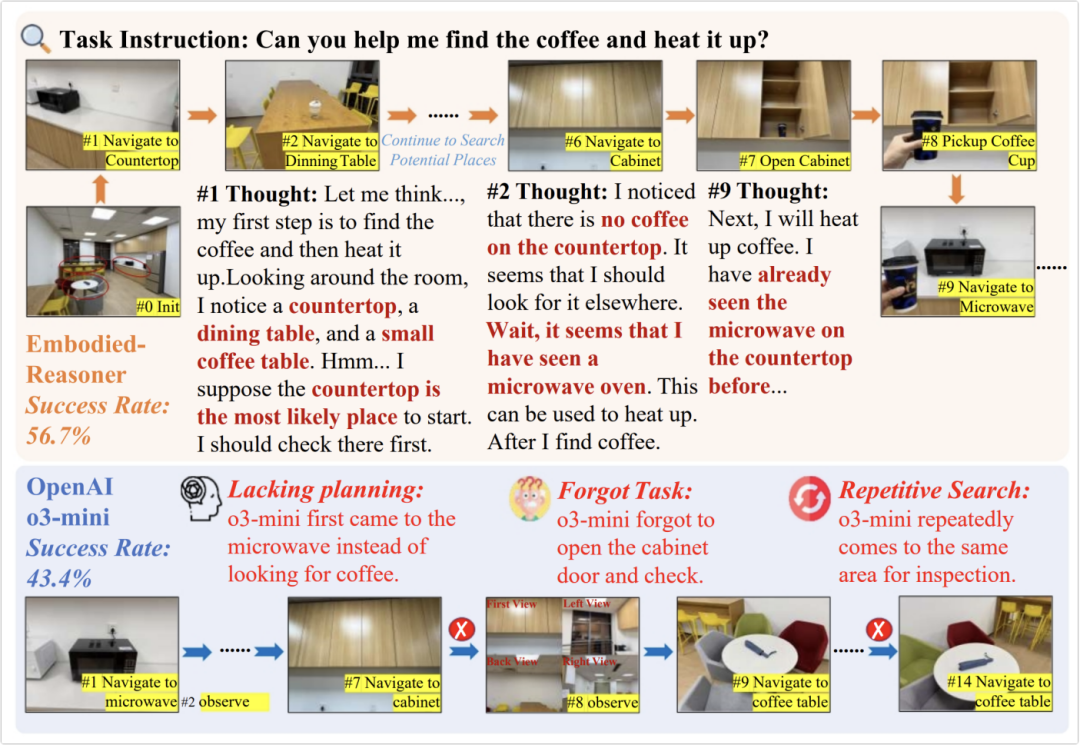
任务成功率:在 AI2-THOR 模拟器中,Embodied-Reasoner 的任务成功率达到了 80.96%,显著高于 OpenAI o1 的 71.73%、o3-mini 的 56.55% 和 Claude-3.7 的 67.70%。这表明其在任务执行方面更加可靠和有效。
-
任务多样性 :能够成功处理多种类型的具身任务,包括搜索、操纵、运输和复合任务。在面对不同任务类型时,表现出了良好的适应性和泛化能力。
(二)推理能力
Embodied-Reasoner 在推理能力方面表现出色,能够生成详细且连贯的推理过程,显著优于其他模型:
-
深度推理 :在需要复杂推理的场景中,例如涉及多步骤规划和空间推理的任务,Embodied-Reasoner 能够生成丰富多样的思考过程,包括情况分析、任务规划、空间推理、自我反思和双重验证等。与 OpenAI o1 和 GPT-4o 等模型相比,其推理过程更加深入和全面,能够更好地理解和解决复杂问题。
-
推理速度:在保证推理深度的同时,还具备较快的推理速度,能够在较短时间内生成推理结果并采取行动。这使得其在实时交互任务中具有明显优势,能够及时响应环境变化,提供流畅的交互体验。
(三)多模态交互
Embodied-Reasoner 的多模态交互能力使其能够高效地处理图像和文本信息:
-
图像识别准确率:对环境中的物体图像识别准确率达到了 95% 以上,能够有效地区分不同物体的类型、位置和状态,为其后续的推理和行动规划提供了准确的视觉信息。
-
语言交互自然度:生成的语言描述和指令自然流畅,与人类语言表达方式接近。在与用户的交互过程中,能够清晰地传达其思考过程和行动计划,提高了人机交互的体验。
(四)环境交互
Embodied-Reasoner 在环境交互方面表现出色,能够自主观察环境、探索房间并找到隐藏物体:
-
环境适应性:在不同类型的室内场景中,如厨房、卧室、客厅等,都能够快速适应环境,根据场景特点调整行动策略。无论是在整洁有序还是相对杂乱的环境中,均能有效完成任务。
-
探索效率:在寻找隐藏物体时,探索效率高,能够快速确定可能的藏匿地点并进行搜索。与 OpenAI o1 等模型相比,其探索步骤更加优化,减少了不必要的搜索动作,提高了任务执行的效率。
(五)与其他模型对比
Embodied-Reasoner 在多个方面显著优于其他先进模型,以下是具体对比:

从上表可以看出,Embodied-Reasoner 在任务成功率、探索效率和任务完整性等关键指标上均优于其他模型,尤其是在复杂任务中表现更为突出。
四、核心功能
(一)深度推理能力
Embodied-Reasoner 具备分析、空间推理、反思、规划等多种推理能力。它能够处理复杂的具身任务,例如在模拟器中搜索隐藏物体、操纵和运输物品等。例如,在一个需要寻找隐藏钥匙的任务中,模型能够通过分析环境、规划路径、执行搜索动作并不断反思调整策略,最终找到钥匙。
(二)多模态交互处理能力
该模型能够处理长序列的图像–文本交互上下文。它结合视觉输入和语言输出,实现高效的人机环境交互。例如,在与用户交互时,模型能够通过视觉输入理解用户的需求,并通过语言输出提供详细的解释和反馈。
(三)环境交互能力
Embodied-Reasoner 可以自主观察环境、探索房间并找到隐藏物体。它能够排除干扰,最终找到目标物体并完成任务。例如,在一个复杂的室内环境中,模型能够通过观察和推理,找到隐藏在某个容器中的物品。
(四)开源模型和数据集
Embodied-Reasoner 提供 7B 和 2B 两种大小的开源模型。其数据集包含 9.3k 交互式的观察–推理–行动轨迹,涵盖 64K 图像和 8M 思考标记。这种开源策略为研究人员和开发者提供了一个强大的工具,促进了具身智能领域的发展。
五、应用场景
(一)智能家居
Embodied-Reasoner 可以帮助用户在家庭环境中寻找物品及操控家电。例如,它可以观察房间、分析和思考,然后一步一步地搜索,最后帮你找到遗失的钥匙或信用卡。这种能力使得智能家居系统更加智能化和人性化。
(二)仓储物流
在仓库内,Embodied-Reasoner 能够自动寻找到并搬运货物,优化仓储管理。它能够排除干扰,最终找到目标物体并完成任务。例如,在一个大型仓库中,模型能够通过观察和推理,找到并搬运指定的货物,提高仓储管理的效率。
(三)医疗辅助
Embodied-Reasoner 可以协助医护人员在医院或养老院中寻找和分类物品。它能够自主观察环境、探索房间并找到隐藏物体。例如,在医院中,模型能够帮助护士快速找到所需的医疗用品,提高工作效率。
(四)工业自动化
在制造工厂中,Embodied-Reasoner 能够完成复杂的操作任务,如零件搬运和设备维护。它能够处理长序列的图像–文本交互上下文。例如,在生产线中,模型能够通过观察和推理,完成零件的搬运和设备的维护任务,提高生产效率。
(五)教育与研究
Embodied-Reasoner 可以作为教育工具,辅助学生理解任务规划,或用于研究人机交互与机器人智能。例如,在教育领域,模型能够通过与学生的交互,帮助他们理解复杂的任务规划过程,提高学习效果。
六、快速使用
(一)克隆代码
下载仓库开源代码
git clonehttps://github.com/zwq2018/embodied_reasoner
(二)训练模型
步骤一:安装依赖
conda create -n llama-factory python=3.11conda activate llama-factorygit clone -b embodied-reasoner https://github.com/iGangao/LLaMA-Factory.gitcd LLaMA-Factorypip install -e ".[torch,metrics]"pip install wandb accelerate deepspeed importlib-metadata
步骤二:数据准备
请参阅data/README.md 检查数据集文件格式的详细信息。
train_muliturn_9390.json :具有 sharegpt 格式的训练数据
[{"messages":[{"role":"system", "content":"xxx"},{"role":"user", "content":"<image>xxx"},{"role": "assistant", "content": "xxx"},...]"images":["",...]}]
步骤三:运行训练
运行训练脚本:
bash scripts/train.sh(三)运行评估
步骤一:安装依赖
conda create -n embodied-reasoner python=3.9conda activate embodied-reasonerpip install -r requirements.txt
步骤二:运行评估脚本
python evaluate.py七、结语
Embodied-Reasoner 作为一款开源的多模态具身模型,在参数效率和性能之间实现了出色的平衡。它不仅在复杂的长序列交互任务中表现出色,还为未来具身智能的发展提供了新的思路。对于需要高效具身交互解决方案的研究人员和开发者来说,Embodied-Reasoner 是一个值得尝试的开源模型。其开源特性和强大的功能为研究人员提供了一个强大的工具,促进了具身智能领域的发展。
八、项目地址
项目官网:https://embodied-reasoner.github.io/
GitHub 仓库:https://github.com/zwq2018/embodied_reasoner
arXiv 论文:https://arxiv.org/abs/2503.21696
(文:小兵的AI视界)