
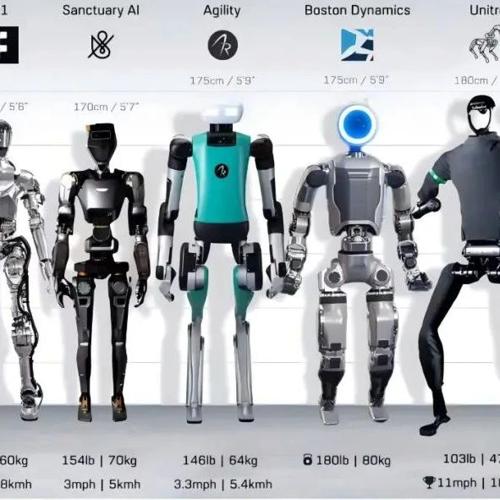
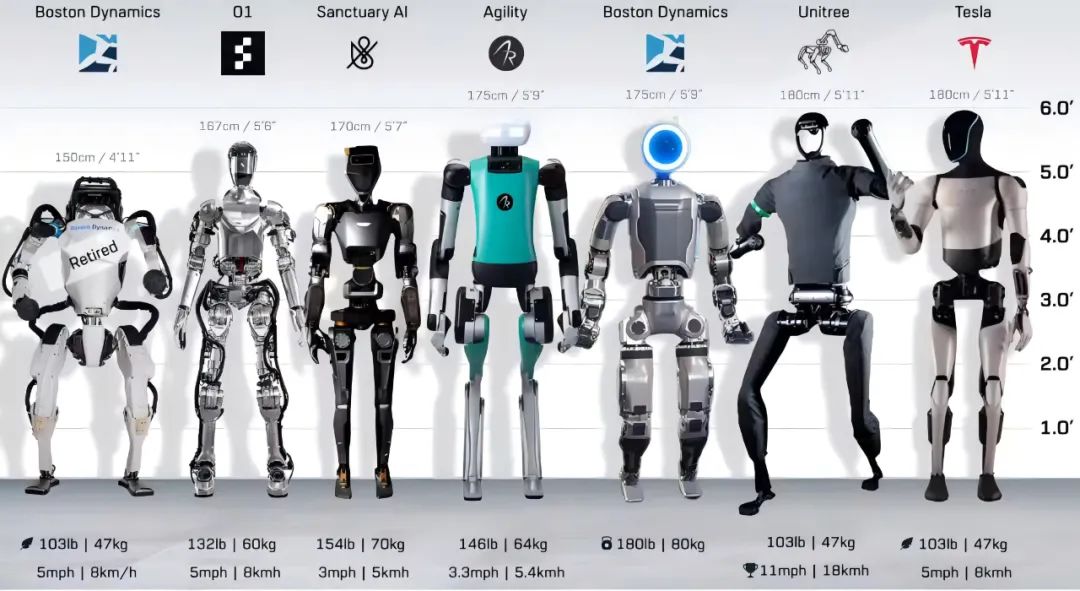
近年来,作为科技创新的重要代表之一,人形机器人不断成为科技头条的焦点,吸引了大量资本的投入。从投资机构到初创公司,纷纷涌入这一赛道,在过去的一年当中,一些成立甚至不足一年的企业估值迅速突破数十亿。然而,尽管受到资本市场热捧,以具身智能为代表的人形机器人的商业化进展与规模化落地却表现得并不理想,金沙江创业投资基金朱啸虎的犀利言论,更是为这个产业敲响了警钟。
▍资本的热捧助推人形机器人产业出现资本泡沫
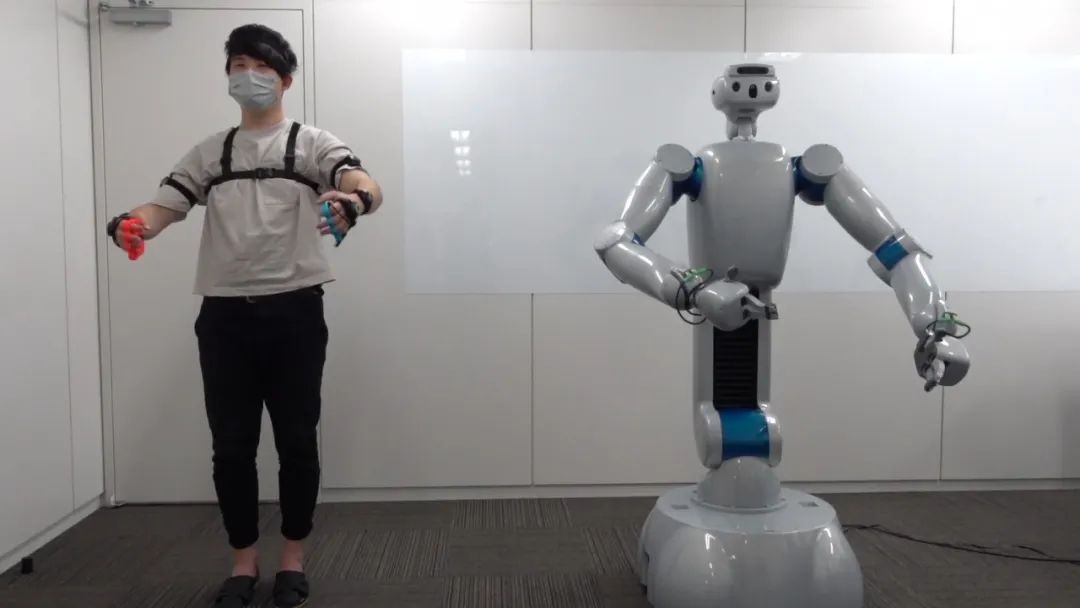
以智能护理机器人为例,该机器人虽然被设计用于为老年人提供帮助,但在实际应用中却表现得差强人意。动作缓慢,泛化能力差,容错率低,都成为用户吐槽的诟病。如抓取咖啡杯,都需要经过反复的“彩排”,在实际执行当中,还不一定能够一次成功。这种技术上的滞后,使得这些机器人的市场落地远未达到预期效果。而那些所谓炫技的跳舞,空翻动作,只不过是遥操作和模型训练控制,依旧需要人类在后台遥控,这并非我们理解的具身智能世界的范畴。
人形机器人领域的现象揭示了一个普遍的行业问题,即资本市场对新兴技术的盲目追捧以及对技术成熟度的忽视。在某些情况下,资本的大量流入未必能够有效促进技术的实际进步,反而可能导致市场泡沫的产生。例如,2024年人形机器人概念的崛起吸引了大量资本的关注,但由于技术尚处于初步发展阶段,这些资金的投入并未带来预期的技术突破。
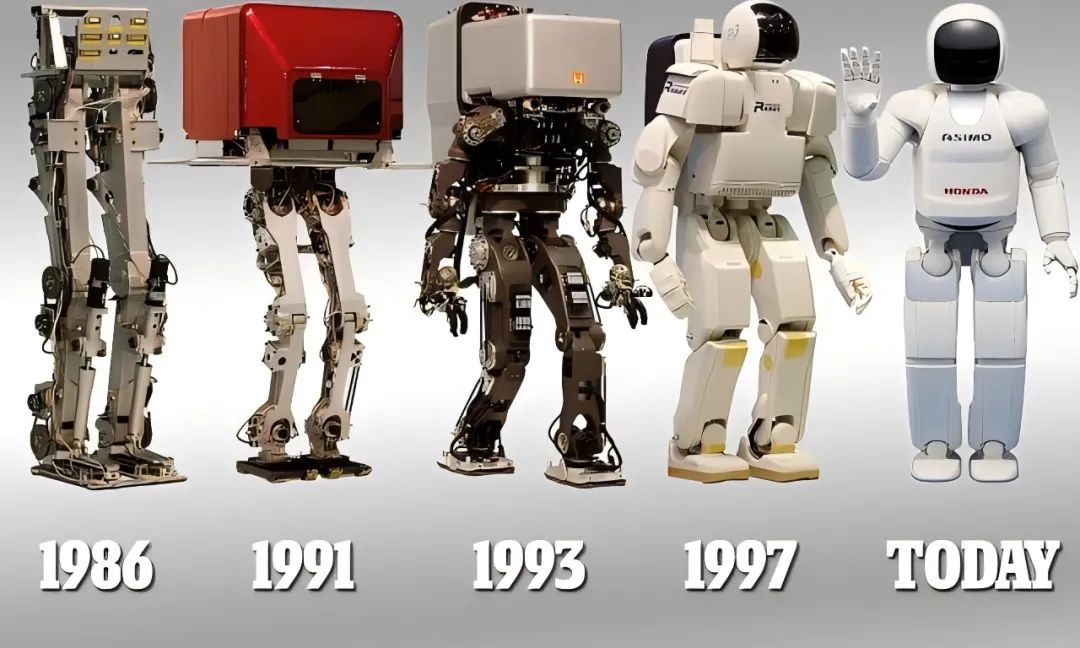
这一现象并非首次出现。回顾过去几十年的科技发展历程,类似的情况屡见不鲜。日本本田公司推出的Asimo机器人曾在2000年震惊全球,作为当时仿生技术的顶峰之作,Asimo不仅能够以一定速度奔跑、上下楼梯,还能与人类进行基本的互动。然而,鉴于其高昂的制造成本及对人工编写精密算法的依赖,Asimo项目最终于2018年宣告终止,成为技术理想化与市场需求未能完全匹配的失败案例。类似的情况也曾出现在其他机器人公司身上,例如波士顿动力的“BigDog”和“Atlas”等,均未能实现长期的商业化成功。
▍人形机器人在感知与运动控制方面依旧存在技术瓶颈
尽管人形机器人技术在某些领域取得了一定进展,尤其是在感知与运动能力方面,但在面对复杂的现实环境时,技术依然面临着诸多挑战。从20世纪70年代日本早稻田大学加藤一郎教授制造的首个真人尺寸机器人,到今天依托多传感器系统和先进运动控制技术的机器人,技术的进步使机器人逐步能够感知环境、做出决策并执行动作。然而,这些技术在实际应用中的表现仍然受到一定限制。

其中,机器人在感知环境、决策计算和动作执行方面的技术进展是至关重要的。尽管激光雷达、计算机视觉等技术不断发展,助力机器人更好地感知周围环境,但在复杂和多变的环境中,机器人依然面临感知精度不足的问题。虽然现有的机器视觉技术可以实现基本的功能,如边缘检测和立体视觉重建,但由于受到光照、反射、环境噪声等因素的干扰,现有算法尚未能够稳定且高效地应对动态变化的环境,限制了其在实际应用中的表现。

此外,机器人运动控制的稳定性和精准度依然是技术发展的瓶颈。传统机械臂通过正向和逆向运动学理论实现动作控制,但对于具有复杂结构和高自由度的机器人,尤其在人形机器人领域,动态平衡与运动协调依然是亟待解决的难题。机器人不仅需要精准执行预定动作,还必须具备实时调整姿态和动作的能力,以适应复杂且不断变化的环境。
▍现阶段人形机器人最大的问题在于缺乏智能决策能力
图灵在其经典论文中提出了人工智能与机器人技术的统一性,认为机器人应当具备与人类相似的智能表现。然而,随着时间的推移,二者的发展路径逐渐出现了明显的分化。人工智能,尤其是在深度学习和大规模神经网络的突破下,已经在图像识别、语音理解等领域取得了显著进展,逐步接近人类的认知水平。相比之下,机器人技术依旧停留在传统的运动控制和机械工程层面,缺乏人工智能所具备的灵活性和自主性。
人工智能的成功,特别是在语言处理、视觉识别等领域,得益于深度学习算法和强大计算能力的支持。这些技术突破使得机器能够在执行复杂任务时展现出与人类相近的智能表现。然而,机器人技术在这些领域的进展相对滞后。
目前的机器人,尤其是人形机器人,仍然依赖于预设的程序和简单的控制信号,缺乏真正的智能决策能力。尽管机器人能够执行看似复杂的动作,这些动作背后并未体现出深层次的智能支持,其本质仍然是基于预编程指令的执行,远未达到自主决策和灵活适应环境的能力。但这些动作背后并没有深层的智能支持,其本质仍然是基于硬编码的指令执行。
▍结语与未来:
尽管人形机器人的落地化还有很长的路要走,但我们依旧可以看到人形机器人发展带来的技术潜力,甚至根据现有的技术路线,预判未来的趋势。尤其是近年来,强化学习等新兴技术逐渐被引入机器人控制领域,通过模拟与学习,机器人能够在反复试验和调整中优化自身的动作控制策略。
彼得·阿比尔等学者提出的学徒学习方法便是这一领域的重要进展之一。通过让机器人在反复试错的过程中逐步掌握任务执行技巧,强化学习为机器人提供了更强的自适应能力。不过需要关注的是,这一方法仍然需要大量的计算资源和时间投入,才能实现预期的效果。
此外,如何提升机器人对环境的感知能力,使其能够在复杂且动态变化的环境中做出自主决策,仍然是技术突破的核心问题。随着技术的不断进步,机器人不再单纯依赖于固定的感知模式,而是朝着更加灵活与智能的方向发展。机器人的未来,或许不仅仅在于提升机械控制能力,更在于如何赋予机器人类似于人类的认知能力,使其能够在不断变化的环境中做出自主判断与反应。
人形机器人的发展并非一蹴而就,短期乐观来看3-5年人形机器人才会开始进行小批量规模化落地,现阶段,机器人技术依然面临感知、运动控制、智能决策等多方面的挑战,而这一过程将是一个循序渐进、不断突破的过程。
来源:具身智能大讲堂
(文:机器人大讲堂)