

明敏 发自 凹非寺
量子位 | 公众号 QbitAI
现在整个具身智能产业都很火热,但关键的一个事情是我们要建立一个统一的标准体系。
而且这个体系,要从娃娃抓起。
谁来做?清华出手了。
清华大学智能产业研究院(AIR)和地瓜机器人共同打造的RDK UniBots具身智能科教平台正式发布。
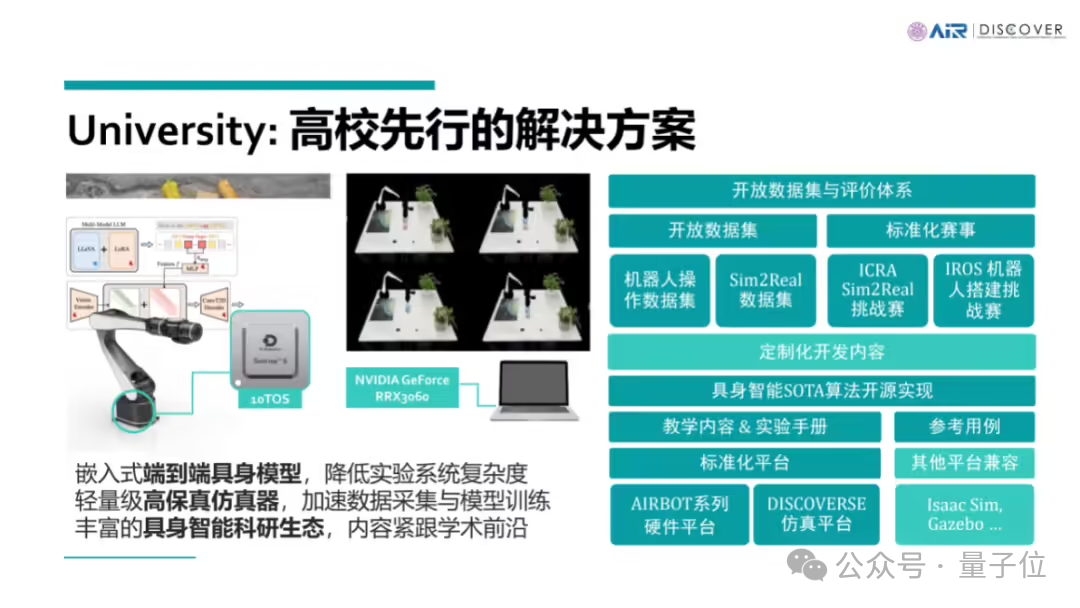
它具有兼容广泛科教场景的统一技术架构,适用于K12 STEAM教育、高等教育、科研探索等场景。
不局限于具身智能相关专业,如清华大学土木工程系,已经将该平台用在了日常课程中。
据AIR DISCOVER Lab主任周谷越介绍,该平台能让学生更早、更具体了解具身智能在土木工程领域如何应用。

要知道,机器人+建造已经是当下非常具体的一个应用方向了。包括欧洲一些高校的实验室也会把重点放在这一方面。
土木领域以外,RDK UniBots更希望成为一个开放的接口,可以适配不同专业的教育需求,并且覆盖不同教育程度的需求,从幼儿园、中小学到大学科研那种。
周谷越表示,相比于奥数等早教课程,他更希望自己的小孩能去和ChatGPT聊聊天、知道一些未来的工具大概会是什么样。
具身智能也是如此。
未来20年,世界将会是一个完全不一样的状态,在这样的前提下,让小朋友们早点接触具身智能就变得非常必要。
与地瓜机器人共同打造
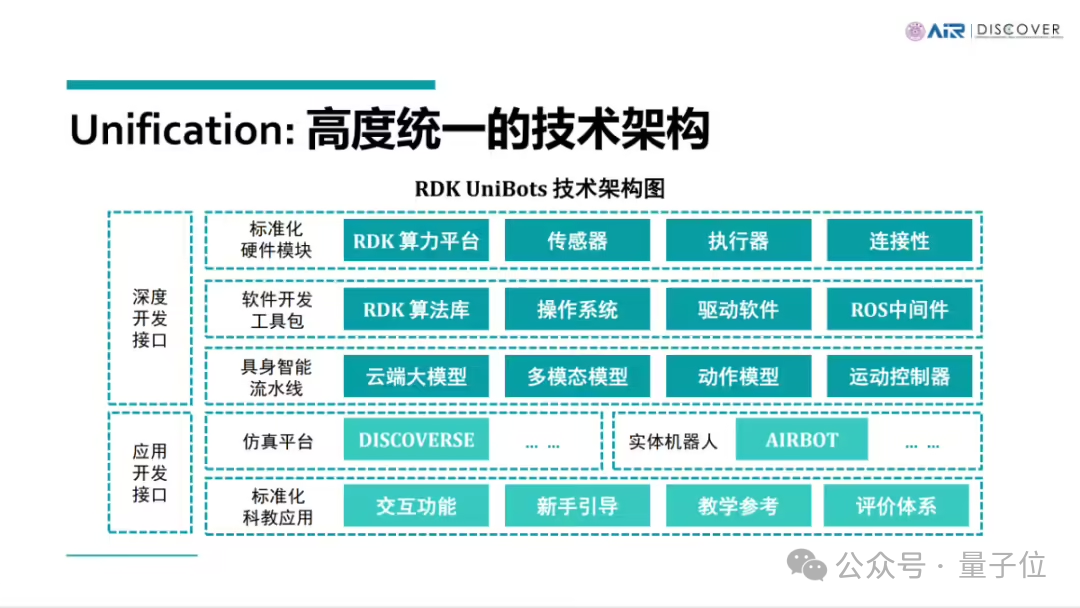
据官方介绍,RDK UniBots具身智能科教平台以RDK算力平台与板载具身智能算法为基础。
它采用分层技术架构,涵盖从硬件到软件的完整解决方案,打通从RDK算力平台到DISCOVERSE仿真平台、AIRBOT系列机器人平台等具身智能软硬件应用载体的技术开发链路。
其中,RDK(全称D-Robotics Robotics Developer Kits)是地瓜机器人一站式开发者套件,它支持多层级算力平台、100+算法与应用极简部署、200+开源代码仓库以及100+机器人配/套件等。
它支持0代码开发机器人的启动相机、启动YOLOv10目标检测、抓取物体时的跟踪检测等。
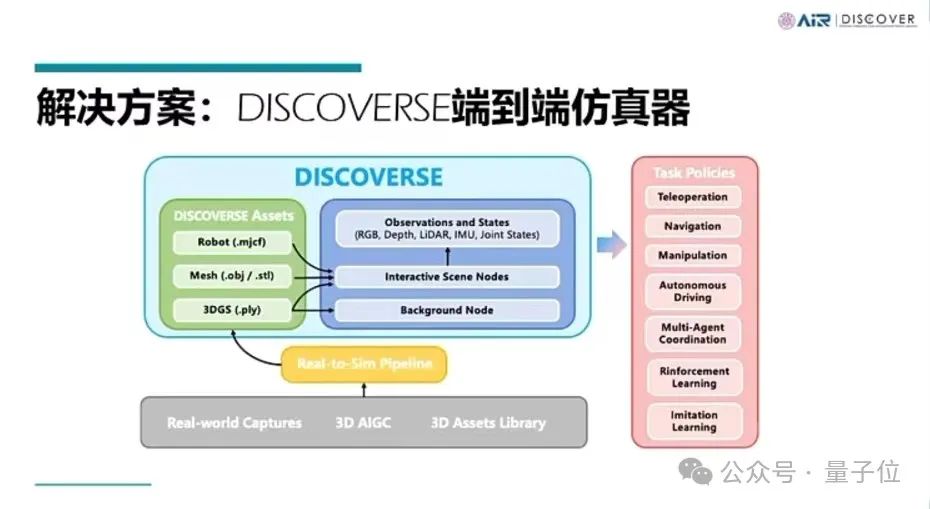
DISCOVERSE端到端具身智能仿真平台是由清华AIR DISCOVERSE实验室推出,面向端到端仿真三大难点而来:
-
高保真高实时神经渲染
-
生成式3D
-
与物理规律关联——3D世界模型
它支持高保真Real2Sim,可以重建出遵循物理规律的数字资产(比如具备丰富的几何和光学物理属性支持)。支持轻量化高并行渲染,不仅可以多智能体并行训练,而且3060显卡即可使用简单场景,在常规配置下跑出高性能。并且支持具身任务通用仿真,以中间件为核心的架构,可以更好接入各种数字资产(传统/生成式),支撑丰富下游应用。
在此基础上,RDK UniBots可以支持丰富类型的机器人开发。

据清华AIR方面透露,目前RDK UniBots主要先从大学开始推行。面向中小学生的推广不会局限在机器人开发这一个维度,可能更多是借用具身智能辅助学生学习知识。
不过,清华AIR方面也强调,打造这一平台更多是希望在行业内建立一个通用标准。
这件事不是由商业化来驱动。作为一个平台,我们不会以它是否赚钱来衡量要不要去做。
地瓜机器人CEO王丛也表示,这个平台最大的意义就是为市场提供一个标准体系。只有建立起相对统一的框架,才能更快加速学术和产业上的进展。
为何是清华AIR+地瓜机器人?
先来看清华AIR。
在Open Day上,清华AIR院长张亚勤院士表示,在研究院成立初期就重点关注机器人领域,建立DISCOVER实验室。
实验室核心围绕计算机视觉、图形学、机器人学几个方向展开探索,并致力于将如上先进技术带入到实际产业中去。
对于具身智能领域,目前DISCOVER实验室已经有了比较系统性的理解。
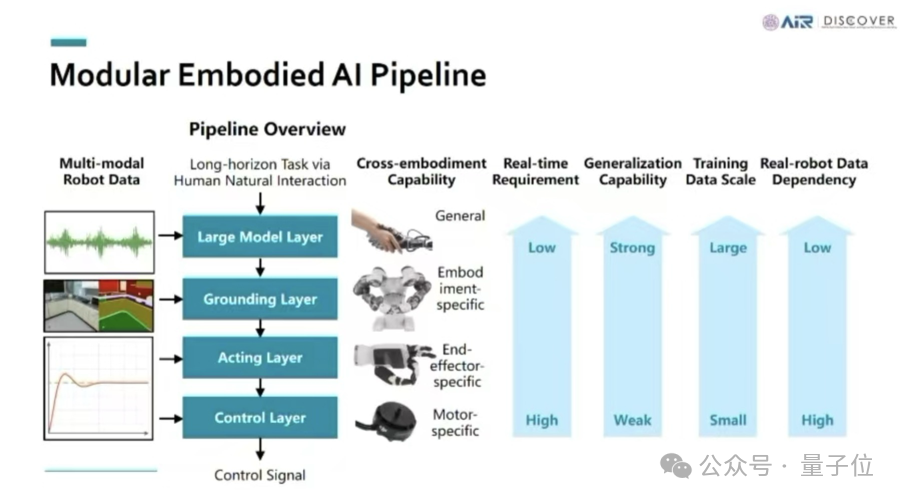
他们将具身智能整体pipeline划分由上至下划分为四个层,基于这四个层,可以将人类物理世界的自然语言逐步转化成机器人能理解的标准化语言,越底层越聚焦硬件和较窄任务,越上层越灵活泛化。
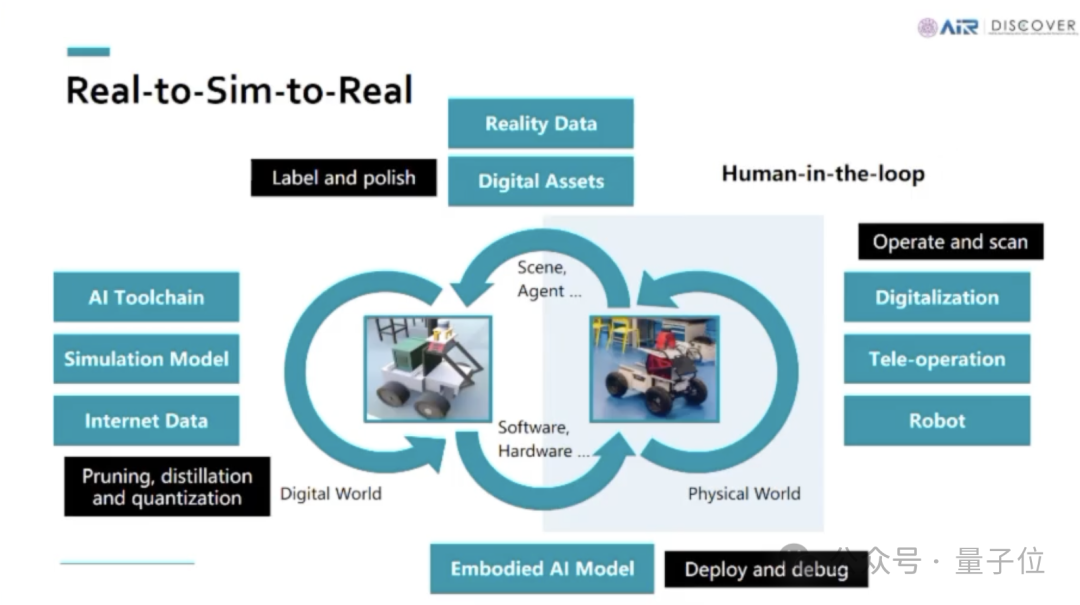
同时,实验室还在一直探索RSR架构(Real2Sim2Real),用仿真技术来改善机器人及自动驾驶领域数据不足的问题,模拟长尾现象,实现真实场景和仿真场景的双向连接。
那么,清华AIR为何选择和地瓜机器人一起共建产业?
地瓜机器人,前身为地平线机器人部门。作为一家具有芯片基因的机器人基础设施提供商,地瓜机器人本身就更加关注底层技术以及应用开发。
今年,地瓜机器人发布了专为通用机器人而生的高性能智能计算芯片旭日5。
它是目前在10TOPs算力下能够真正支持机器人各类算法,同时保持功耗最低的芯片,没有之一。

在芯片之上,面向整个生态的中小创客和个人开发者还推出了RDK X5,致力于打造千元之内最好用的机器人开发套件。
同时也推出了RDK S100,拥有百TOPs级算力,专为大参数Transformer优化,可以满足人形机器人、仿生机器人等具身智能应用场景对感知精度和泛化能力的高阶需求。
正如CEO王丛所说,芯片公司非常需要合作伙伴一起成长。
我们希望看到有爆品,希望看到更丰富的应用,也关注对下一代工程师的培养。有更多人来开发、来玩,就会有更好的创意产生。
和清华AIR达成深度合作也是出于这样的考虑。
在更早之前,由清华AIR孵化的求之科技基于旭日5打造的移动升降双臂平台MMK2。地瓜机器人也和清华大学合作举办ICRA 2024具身智能赛道。
由此也就不难理解,为何清华AIR会与地瓜机器人携手,一起构建具身智能领域通用标准体系。
当然这种产学研合作,也能更进一步加速具身智能领域技术发展。
周谷越预测,2025年具身智能领域将在灵巧手和触觉两个领域有突破,“这个是确定的”。
判断依据在于灵巧手的边缘AI芯片、传感器、小型化执行器等基本都成熟了,现在正处于一个系统集成阶段,2025年可以做好。
王丛也肯定了这一趋势,今年学术圈在分头做夹爪对刚性物体、柔性物体、铰链物体的泛化,之后灵巧手还需要把这三方面工作再重新做一遍。而且当带有触觉的灵巧手可以解决一些泛化问题,将一些云端任务下放到本地时,对于本地芯片端的算力带宽又是一种挑战。
这看上去是重复,但对于我们做技术的而言,这更是创新。
—
(文:量子位)