
“救命神器”来了!
异物吸入(FBA),这事儿谁都怕遇上。
尤其是小朋友吃东西时不小心呛到,或者老人家吃饭时被异物卡住,轻则咳嗽不止,重则危及生命。数据显示,5岁以下儿童和老年人是高发人群。更要命的是,传统的海姆立克急救法虽然对卡在主气道的大异物有效,但对于掉进支气管深处的小异物(占比超过80%)却束手无策。若不能及时取出,可能导致严重的肺部感染、阻塞甚至呼吸衰竭。
这时候就得上支气管镜了。但问题来了——支气管镜手术对技术要求高,通常还得依赖术前CT扫描,在资源匮乏的地区,专家医生和专业设备的匮乏使得治疗难度加大。
现在,浙江大学控制科学与工程学院王越教授、陆豪健研究员、熊蓉教授团队联合浙大一院、伦敦大学学院(UCL)等机构,研发出了一套AI支气管镜机器人系统,不用CT、能远程操控,关键是AI能自主在肺里搜索异物!
这项研究以“AI Search, Physician Removal: Bronchoscopy Robot Bridges Collaboration in Foreign Body Aspiration”为题,于2025年7月30日发表在国际顶级期刊《Science Robotics》上。该研究第一作者为浙江大学控制科学与工程学院的刘立陆与张敬禹博士,通讯作者为王越教授、陆豪健研究员、熊蓉教授。
团队在活体猪身上做了实验,成功演示了从成都远程操控杭州的机器人,把实验猪肺里的异物取了出来!
最绝的是,整个系统重量不超过2公斤,材料成本低于5000美元(约3.6万人民币)。这意味着,基层医院也有望用得起了!
视频:AI–专家协作远程支气管镜机器人系统概览视频
▍AI自主搜索,医生远程“收尾”
传统支气管镜手术有多难?
首先得有经验丰富的医生,能熟练操控支气管镜在复杂的气管树状结构中穿行。其次通常还得依赖术前CT定位。最考验人的是,整个过程医生必须全程紧盯屏幕,精神高度集中,稍有不慎就可能损伤气管壁。
浙大团队的创新思路很巧妙:让AI去干最累的活儿——在肺里搜索异物,医生只在最后关头出手夹取。
研究团队将整个手术流程分为五个阶段:首先由当地医护人员插入支气管镜并激活AI;接着AI自主进行全肺探索;发现异物后医生接管控制;医生远程操作钳子夹取异物;最后AI再次接管,安全撤出支气管镜。
具体怎么实现的?研究团队开发的AI模块能够利用实时图像构建树状结构的肺部拓扑图(TLMB),模拟人类专家的路径记忆与决策流程。系统采用深度优先搜索(DFS)算法,确保不遗漏任何分支。在没有导航、没有地图的前提下,AI就能实现全肺自主搜索。
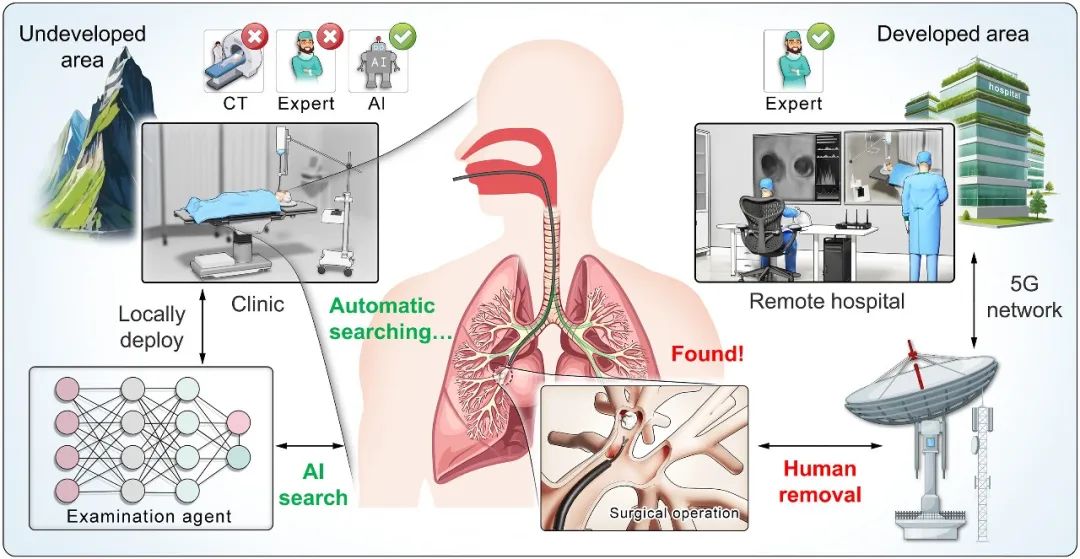
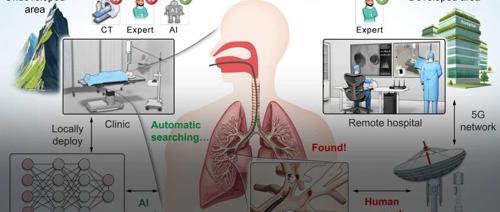
图1:AI–专家协作远程支气管镜机器人系统示意图
通讯作者陆豪健研究员道出了研发初衷:“我们希望构建一个能‘代替专家’完成异物搜索的AI系统,并让远程专家只在最后夹取异物时出手,从而提升效率、扩大覆盖、降低门槛。”
这套系统完全不需要术前CT和外部定位系统。AI仅凭支气管镜的实时画面,就能自主探索整个肺部。实验数据显示,在整个异物取出流程中,医生只需在约20%的时间内进行操作,大大减轻了认知与操作负担。
更厉害的是,在多个场景下,AI的搜索范围和操作稳定性接近甚至优于人类专家。实验结果显示,AI在探索第10代支气管时观察到的分支数量达到77.5±10.2个,而人类专家仅为61.0±9.8个。AI的操作误差仅为17.67±0.54像素,显著低于专家的28.45±0.57像素。
▍1500公里,5G连接的远程手术
远程手术听起来很科幻,但浙大团队真的做到了。
在实验中,研究人员在成都与杭州之间(约1500公里)通过5G网络实现了实时异地远程手术。5G网络提供了平均211.41±5.48 Mbps的下载带宽和88.29±3.95 Mbps的上传带宽,延迟仅40毫秒左右,完全在人类反应时间(200-300毫秒)范围内。
当AI完成搜索并定位异物后,身在成都的医生通过远程连接接管控制权,成功将杭州实验室里活体猪肺中的异物夹取出来,证明了系统在极端条件下的稳定性与安全性。
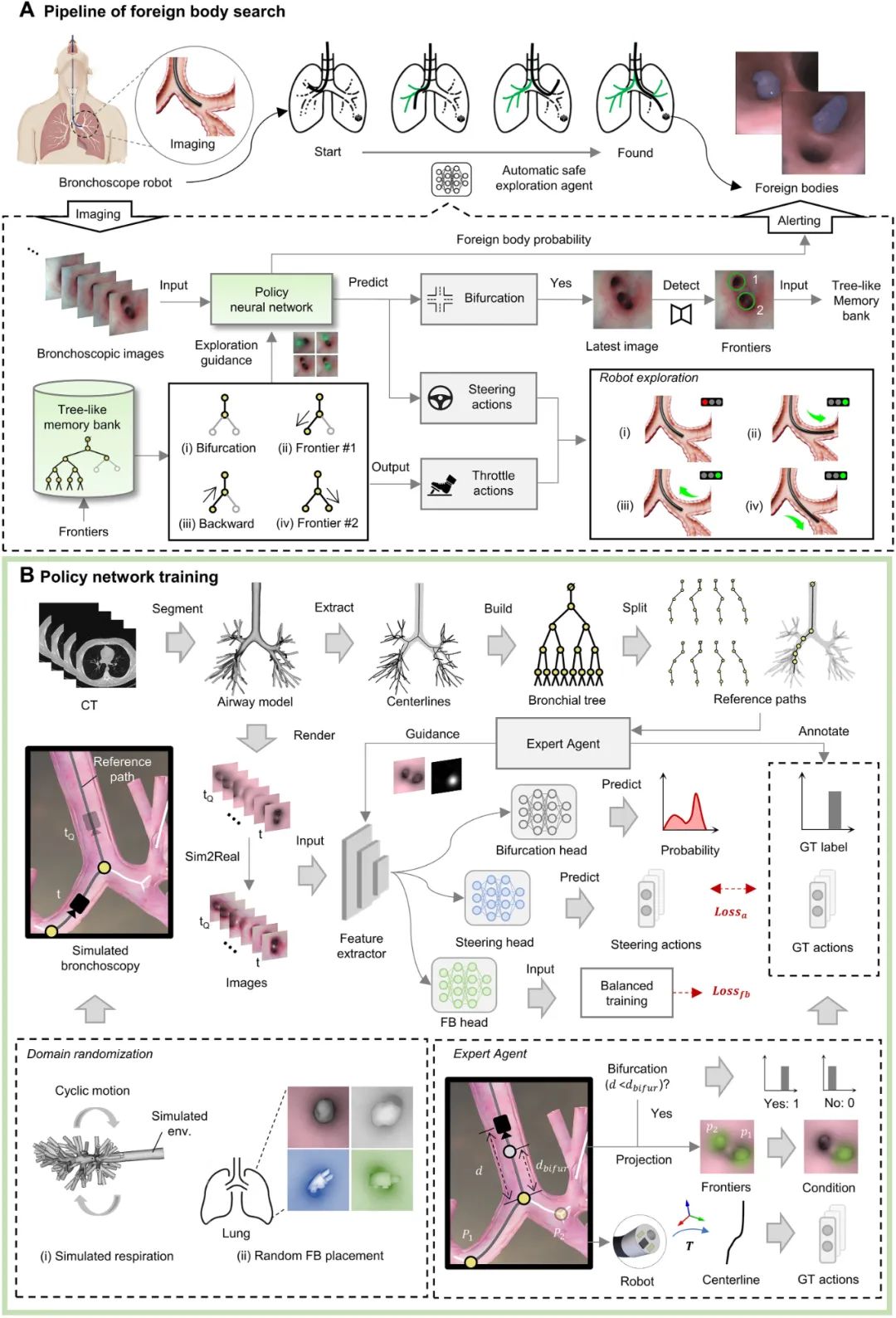
图2:AI自主搜索算法结构和训练策略
这种“AI主导、医生协作”的任务分工模式意义重大。想象一下,如果偏远山区的孩子不小心吸入异物,当地医院没有专业的支气管镜医生。有了这套系统,当地医护人员只需要把设备接上,远在大城市的专家就能通过AI辅助完成手术。
王越教授对此深有感触:“我们看到的是一种模式的改变。很多基层医院缺的不是医生,而是能替代他们完成基础搜索任务的工具。”
系统还设计了安全保障机制:当网络连接中断超过5秒,钳子会自动撤回,本地AI会接管控制,安全引导支气管镜退回气管,等待进一步判断。
▍从L2到L3,机器人越来越“聪明”
这已经不是浙大团队在支气管镜机器人领域的第一次突破了。
去年1月,王越教授、陆豪健研究员、熊蓉教授团队在国际知名期刊《Nature Communications》上发表了AI co-pilot辅助驾驶支气管镜机器人的研究。当时的系统在国际范围内首次攻克了支气管镜机器人从无自主(L0)和辅助引导(L1)到部分自主控制(L2)的技术难点。
而这次发表在《Science Robotics》上的新成果,进一步将辅助驾驶升级到AI cooperation,直接把自主能力提升到了L3级别。机器人不再是需要医生全程介入控制的工具,而是成为了可以和医生合作的智能体。
从L2到L3的跨越,意味着AI具备了更高级的自主探索能力。打个比方,L2阶段的AI就像汽车的辅助驾驶系统,能帮你保持车道、控制车速,但你还得握着方向盘。而L3阶段,AI已经能自己开车了,你只需要在关键时刻接管就行。
▍临床价值凸显,基层医疗的新希望
统计数据显示,约85%的异物位于支气管(≥1代),15%在气管(0代)。对于儿童患者,约63%的异物在主支气管(1代),20.4%在更深的支气管(2-23代)。成人患者中,异物主要分布在深部支气管(57.7%)。
在活体实验中,AI驱动的手术平均仅需4.72±2.00分钟即可完成异物搜索和取出,而传统CT引导手术需要约42分钟(包括CT扫描、异物识别、路径规划等)。AI不仅更快,还能在第10代支气管观察到更多分支。
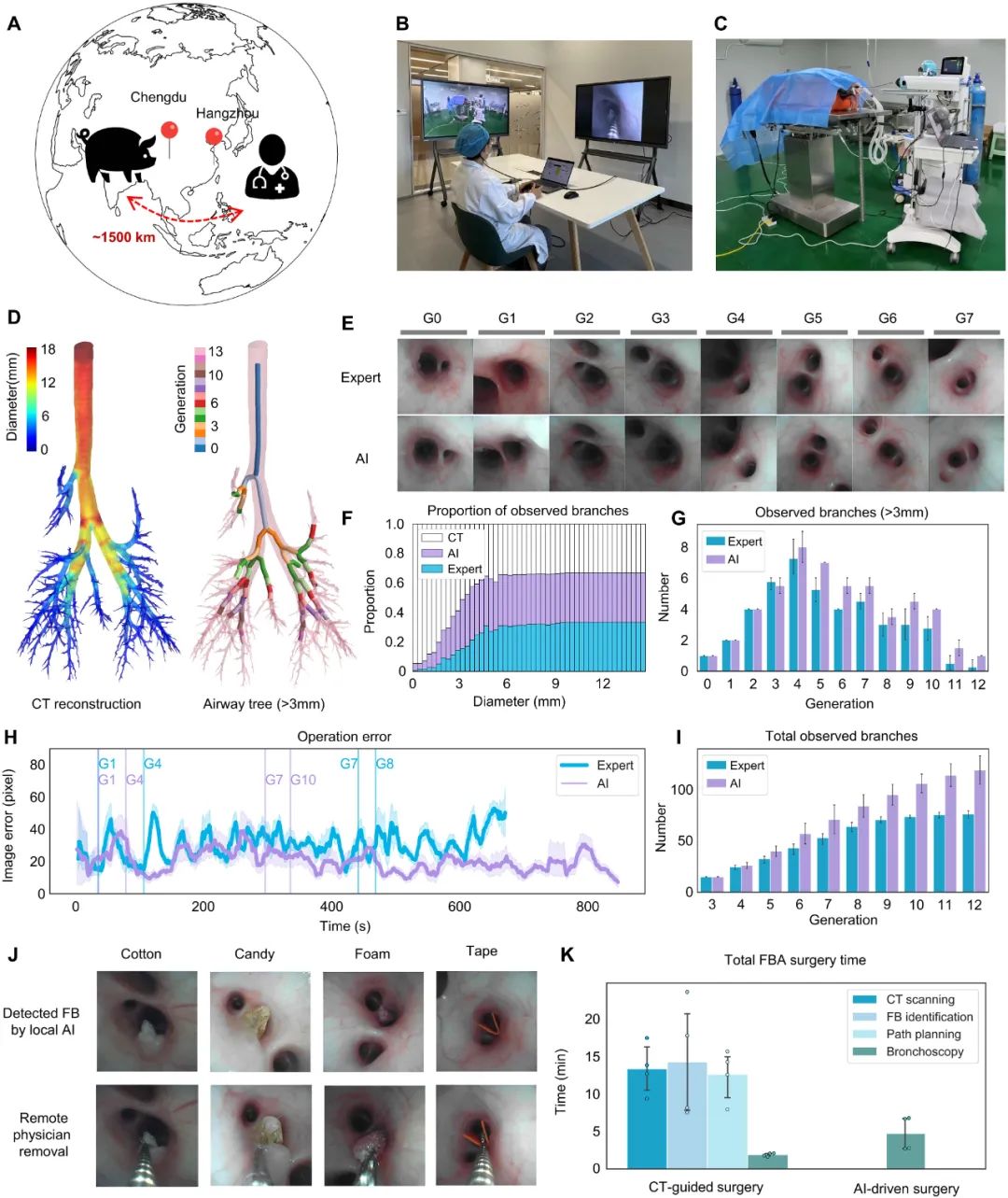
图3:远程动物实验结果图
系统的导管直径仅3.3毫米(带1.2毫米工作通道),比现有的Monarch平台和Ion系统更细,能够进入第九代甚至更深的支气管。对于不同大小的异物,系统都展现出了良好的识别能力。
这套AI支气管镜机器人系统的出现,或许能改变基层医疗现状。便携、低成本、高智能的特点,让它特别适合部署在基层诊所、乡镇卫生院等医疗资源薄弱区域。
这项研究能够填补欠发达地区急诊异物吸入治疗手段不足的空白,为全球急救医疗带来全新的技术方案。
同时,研究也展示了AI在微创诊疗领域的强大潜力,为医疗机器人从“助手”走向“协作者”打开了新局面。
随着算力提升和通信基础设施的完善,类似“AI-医生协作”的手术模式有望在更多疾病场景中应用。或许在不远的将来,每个基层医院都能配备这样的AI助手,让优质医疗资源真正触达每一个需要的人。
这项技术的出现,让我们看到了AI与医生携手守护生命的更多可能。
相关链接:
AI co–pilot论文:
https://www.nature.com/articles/s41467-023-44385-7
AI cooperation论文:https://www.science.org/doi/10.1126/scirobotics.adt5338
(文:机器人大讲堂)