


近年来,随着硬件技术的快速发展,四足机器人在动力与速度方面得到显著提升,加之强化学习等技术的应用,其移动控制的稳健性不断增强。这使得四足机器人在未知环境中执行物资运输、探索等自动化任务的应用前景受到关注。
不过,在地势起伏剧烈的复杂地形中,机器人往往需要具备垂直移动能力。比如,在灾难现场和未开发的自然环境中有大量倒塌的建筑物和岩石,高度变化很大。但现有的四足机器人更擅长水平运动,而专为垂直移动设计的四足机器人,由于身体结构过度特化,在水平移动时表现笨拙。目前能稳定完成这类动作的机器人及其控制方法尚未成熟。
据探索前沿科技边界,传递前沿科技成果的X-robot投稿,来自东京大学的Keita Yoneda研究团队近日成功研发出一款名为 KLEIYN 的四足机器人。KLEIYN 最大的亮点是配备了主动腰部关节,显著提升了机器人的攀爬性能,特别是在狭窄墙壁上的跟踪能力。通过课程学习(Contact-Guided Curriculum Learning),研究团队引导机器人逐步掌握攀爬技巧,最终实现水平移动与垂直攀爬的完美结合。

实验结果显示,KLEIYN 可成功攀爬宽度在 800 mm到 1000 mm之间的墙壁,并实现150 mm / 秒的平均速度。相较传统同类机器人,KLEIYN 的速度提升了近 50 倍,其诞生,无疑为四足机器人在复杂环境中的应用拓展开辟了新的可能!
▍腰部关节:让 KLEIYN 突破空间限制的灵活核心
四足机器人KLEIYN 如何实现既能在平地稳健行走,又能在高墙灵活攀爬?
KLEIYN 这一核心优势实现的秘密暗藏在其腰部关节的创新设计中。
从整体结构来看,KLEIYN 的体重为 18 千克,体长 760 mm,站立高度 400 mm,紧凑的体型为其在狭窄空间内的灵活活动奠定了基础。同时,它全身共有 13 个自由度(DOF),每条腿配备 3 个自由度,躯干部分则有 1 个自由度,这让它既能像普通四足机器人一样完成行走、转向等基础动作,又能通过躯干的调整适应复杂地形。
腿部结构上,KLEIYN 借鉴了开源金属四足机器人 MEVIUS 的优势,每条腿包含肩胛骨连杆、大腿连杆和小腿连杆三个部分,通过肩胛骨关节、髋关节和膝关节连接。所有腿部关节均由减速比为 1:10 的电机驱动,最大扭矩可达 25 牛米,为机器人的行走和攀爬提供了充足动力。
KLEIYN 躯干部分则包括前体连杆和后体连杆两部分,两者结构相同,均采用四块铝板打造出箱形框架,内部巧妙容纳了车载电脑、电池等核心部件。而连接这两部分的,正是 KLEIYN 的设计亮点:该关节可沿俯仰轴旋转,使躯干实现弯曲动作,这一特性为机器人在狭窄墙壁间的攀爬操作提供了关键灵活性。
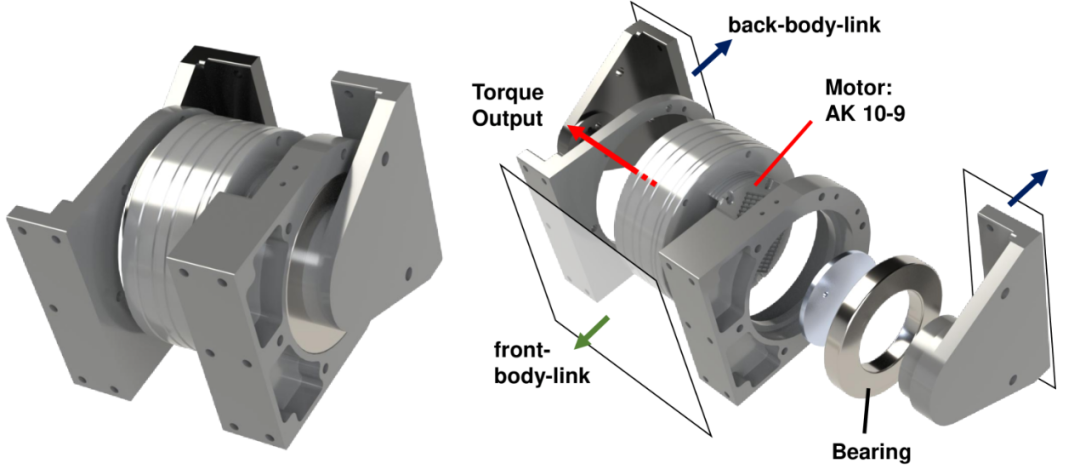
腰部关节采用单自由度旋转结构,框架由精密加工的铝材制成,通过预仿真应力分析验证了强度。为增强刚性,关节采用双支撑结构,在电机输出轴的对侧设置轴承分担负载。更重要的是,电机输出通过 1:9 的低减速比齿轮以准直接驱动方式传递到旋转轴,这种设计不仅保证了动力传输的高效性,还为课程学习中的 “仿真到现实” (sim-to-real)迁移提供了便利。
针对攀爬场景中需承受左右腿合力的需求,研究团队还为KLEIYN 腰部关节配备了最大扭矩 48 牛米的 T-MOTOR AK 10-9 电机,即便负载集中,也能稳定支撑机身完成动作。
▍课程学习:让 KLEIYN 变身攀爬高手的 “智能大脑”
依托课程学习构建的控制策略,四足机器人KLEIYN 得以从零基础逐步掌握高难度攀爬技能,并能灵活应对不同场景的挑战。
其核心采用“Actor-Critic” 架构:训练时,执行者(Actor)输出关节角度等动作,评估者(Critic)评估动作优劣并优化策略;实际作业时,则仅启动执行者,以 50Hz 频率精准控制关节运动。配合编码器、IMU 等传感系统,机器人能实时感知关节状态、自身姿态,并接收目标速度指令,为学习提供 “感知基础”。
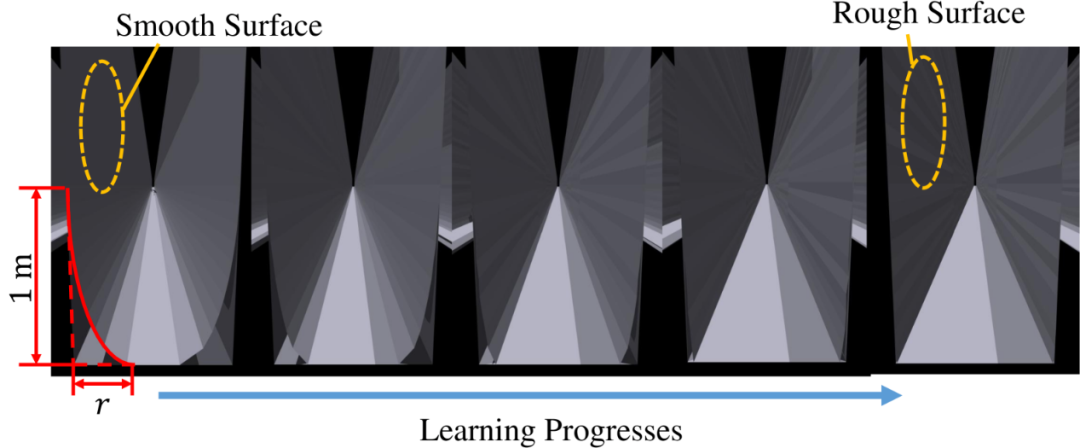
针对垂直攀爬的高难度特性,研究团队创新提出接触引导课程学习方法:先让机器人在墙与地面的弧形连接处学习支撑发力,再逐步过渡到垂直墙壁。同时,模拟器中设置 900-1100mm 宽的墙壁、0.7-0.95的随机摩擦系数、外力扰动等多样场景,让机器人在模拟真实世界中增强适应力。
在学习过程中,非对称 Actor-Critic策略进一步优化了训练效率:执行者专注处理关节状态、目标速度等核心信息,评估者则同步掌握全局位置、摩擦系数等更多隐藏参数,从而更精准地评判动作合理性。
为引导机器人高效学习,研究团队还设计了精细化的奖励机制。奖惩规则如同严格教练:速度贴近目标、姿态平稳就奖励,碰撞、失衡则扣分,引导机器人在试错中掌握省力稳定的攀爬技巧,比如如何调整脚部位置、利用腰部关节适应窄墙。
正是这套课程学习系统,让 KLEIYN 突破传统机器人的局限,在复杂环境中稳健攀爬。下次它在灾难现场穿梭时,背后正是这些算法在默默支撑。
▍实战成果:从实验室到真实场景的攀爬突破
课程学习系统助力下,算法对机器人动作细节的精准优化,让KLEIYN 在模拟与现实中均展现出卓越的攀爬能力。
在模拟环境中,KLEIYN 凭借课程学习掌握了高效攀爬策略:支撑阶段的蹬墙发力与摆动阶段的抬腿移动交替进行,利用腿部回收反冲力提升垂直速度。更值得关注的是,它能成功攀爬未经过训练的 750mm宽墙壁。要知道,KLEIYN 体长 760mm,如果没有课程学习教会它灵活利用腰关节调整姿态,它根本无法在比自身还窄的空间中攀爬。这恰恰证明课程学习赋予了KLEIYN对未知场景的泛化能力。
接触引导课程学习的有效性也得到验证:当墙与地面连接处水平半径 r≥0.26m 时,机器人能学会攀爬;r<0.25m 则失败。这说明课程学习通过循序渐进的课程设计提升了学习效率,避免了盲目试错。
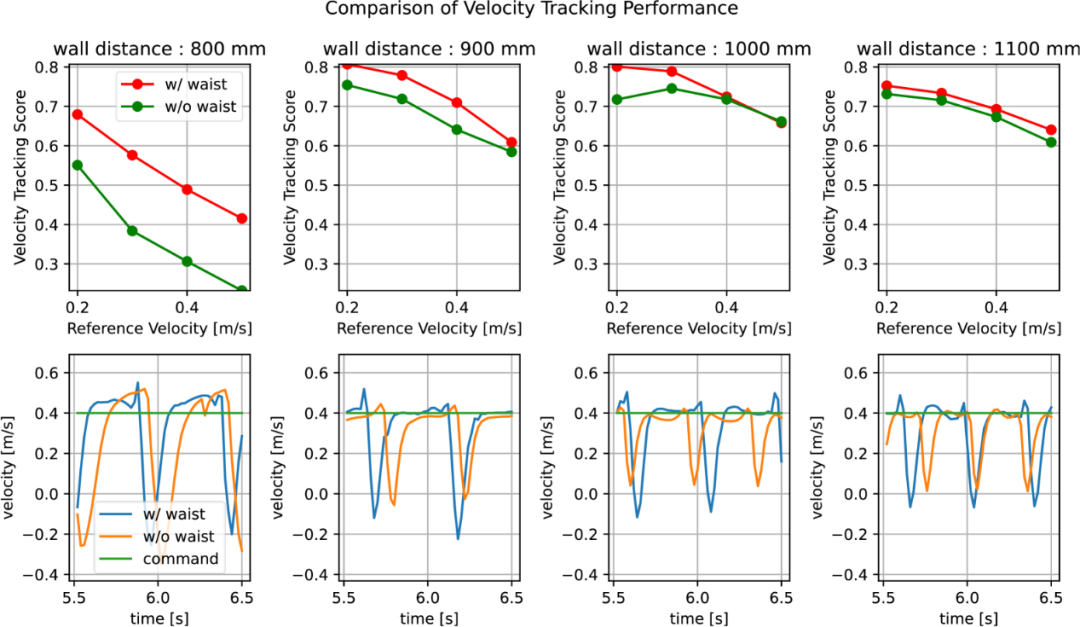
算法与机械结构的协同,让攀爬效率倍增。对比有无腰关节的模型发现,课程学习让腰关节的优势被充分激发:有腰关节的机器人在 800-1100mm宽的墙壁上,对目标速度的跟踪精度更高,窄墙表现更好,且摆动阶段的反冲速度更显著。这是因为课程学习教会机器人如何通过腰关节弯曲调整重心,让发力更精准。
在真实世界中,课程学习的价值进一步显现。KLEIYN在800mm、900mm、1000mm 宽的墙壁上稳定攀爬,800mm 宽墙壁上平均速度达 170mm/s,是传统机器人 SiLVIA 的50倍,还能爬上自身身高2.5倍的高度。面对脚滑等干扰,它能快速调整姿态重新稳定,展现出课程学习训练出的抗干扰能力。同时,其在 150mm 高台阶的上下行走及不平坦石面的打滑恢复,证明课程学习策略可有效迁移到真实运动(locomotion)场景,实现攀爬与行走的双模式整合。
当然,如超宽墙壁扭矩不足、水平偏移导致坠落等挑战依然存在,但这也意味着课程学习有更大优化空间。
未来,研究团队将结合环境感知与负载均衡训练,进一步提升KLEIYN性能。
▍关于X-robot
X-robot是中关村机器人产业创新中心与机器人大讲堂联手打造的权威性信息发布品牌专栏,集前沿探索、产业研究、知识普及于一体,致力于积极推动新质生产力的生成与发展,助力我国乃至全球机器人行业的蓬勃繁荣。X-robot立足国际化视野,通过全方位、多角度的挖掘与追踪,生动展现机器人前沿技术与尖端成果,为学术界、产业界及公众提供一个洞见未来、共享科技的重要窗口。
参考文章:
https://arxiv.org/html/2507.06562v2
(文:机器人大讲堂)