

踝关节是我们身体的关键承重关节,却非常容易在运动、意外或中风后受伤。康复训练对修复受损组织、恢复关节功能至关重要,可以有效地促进踝关节康复,增强韧带弹性和防止关节粘连。但传统人工康复过程漫长且效果难以保持一致。这时,机器人辅助康复就展现出巨大潜力。
相比于康复师,踝关节康复机器人适用于长期、连续治疗,并维持康复效果的一致性。现有的踝关节康复机器人主要分平台式和可穿戴式。平台式机器人能完成更复杂的康复动作且承重能力强,是功能康复的主力。
冗余驱动可以有效地避免踝关节康复机器人并联机构的奇异位形,提升其性能。然而,在原机构基础上添加少自由度支链可能改变机构自由度,使其设计具有挑战性。刚度性能直接影响机器人运行过程中的变形大小,从而影响康复轨迹的精度,是踝关节康复机器人的性能分析中的重要问题。现有研究大多仅考虑驱动器的刚度,未考虑连杆与被动副的影响,无法准确反映踝关节康复机器人的刚度性能。
面对这些挑战,南京航空航天大学吉爱红团队提出一种新型踝关节康复机构(PARM-N)及其冗余驱动形式(PARM-R),得以精准模拟踝关节康复所需的三种核心运动:脚掌上下摆动(背屈/跖屈)、脚掌左右翻转(内翻/外翻)以及沿小腿方向的拉伸(轴向牵引)。根据中医康复理论,这种牵引运动可以更好地促进踝关节康复。
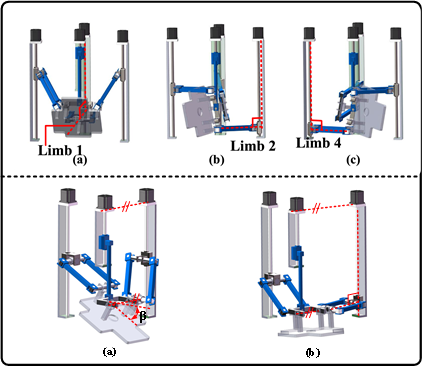
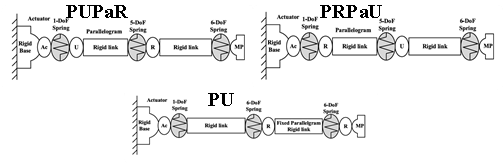
针对现有冗余驱动踝关节康复机构构型设计及性能分析问题,其设计亮点在于“化繁为简”和“性能提升”,结构简图与三维模型如下图所示。
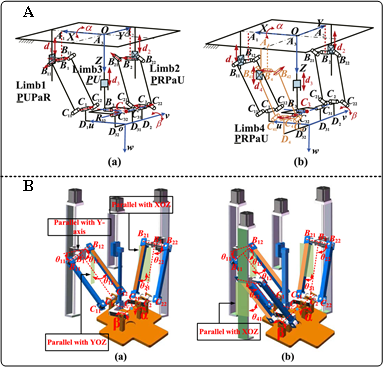
踝关节康复机构的结构简图与三维模型
通过将电机固定于机架,可降低运动部分质量,提升机构的动态响应性能。不同于基于几何约束实现固定转动中心的方法,本研究提出的踝关节康复机器人通过恰约束支链得出机构的转动中心,有效降低了加工成本和装配复杂性。与现有的并联踝关节康复机器人相比,本文提出的冗余驱动踝关节康复机器人及其非冗余驱动构型无球铰及六自由度支链,采用平行四边形关节(Pa)设计扩大了机构的运动范围,降低了制造成本。并且,机构中的过约束可以进一步提升其刚度,比依赖复杂几何约束的老方法更简单可靠。自由度分析表明机构具有绕着X轴、v轴的转动和沿着Z轴的移动,满足踝关节康复的运动需求。
机构的运动学分析是后续性能分析和尺寸优化的基础。通过闭环矢量法推导了机构的位置逆解,并通过仿真对比验证了其正确性。机构位置正解对性能分析与运动控制同样重要,却在以往研究中常被忽视。例如,基于电机编码器反馈的数据,可通过机构位置正解估算动平台位姿。考虑到冗余驱动并联机构位置正解复杂性,采用Newton-Raphson法求解冗余驱动踝关节康复机器人的位置正解。数值对比结果验证了该方法的有效性。对于非冗余构型,根据几何约束方程推导得到位置正解的解析式,数值对比结果验证了其正确性。
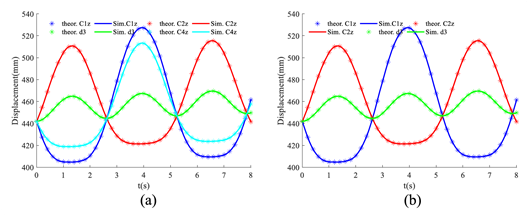
位置逆解结果对比


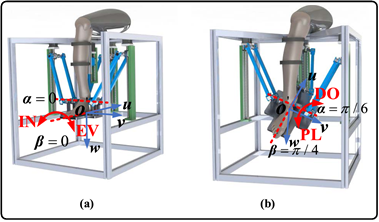
踝关节康复机器人的应用场景
奇异性是并联机构固有的属性,本文基于雅可比矩阵行列式,分析了机构的三类奇异位形。结果表明冗余驱动踝关节康复并联机构仅存在逆解奇异,而对应的非冗余构型则包含三类奇异位形。考虑到机构正解雅可比矩阵的复杂性,采用遍历搜索法对工作空间内雅可比行列式进行数值计算,从而确定非冗余机构的正解奇异位形。研究发现,部分正解奇异位形位于机构工作空间内,且难以通过轨迹规划避免,缩小了趾屈和复合康复训练的范围,导致踝关节活动度不足,影响康复效果。
用户采用坐姿进行踝关节康复,通过弹性绑带将小腿固定于机架支撑板,可减小机构动平台的受力,进而降低机构变形量。为实现左右脚通用康复,机构采用如下图所示的机械限位设计,其中内翻/外翻转动角度范围为-30°~30°,背屈/趾屈角度限制为-45°~45°。
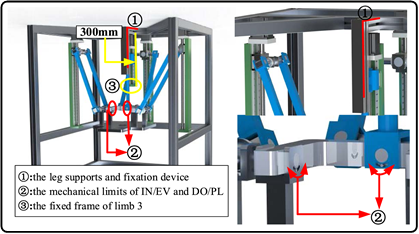
踝关节康复机器人的机械限位
为深入分析验证机构的性能,确保这两款机器人能在最优状态下工作,研究团队还选择了一系列运动学与刚度评价指标,分析机构性能在工作空间内的分布特性,为后续的尺寸优化、样机制造等工作提供依据。
踝关节康复机器人的奇异性分析
踝关节康复机器人的正解雅可比矩阵在工作空间上的分布
目前,相关成果以“Kinematic/stiffness analysis, comparison and optimization of a redundantly actuated ankle rehabilitation robot and its non-redundantly actuated form”为题发表在《Mechanism and Machine Theory》上。论文的第一作者是南京航空航天大学博士生张笑舒,南京航空航天大学吉爱红研究员为该论文的独立通讯作者。
▍机构运动学性能分析:能量的传递效率
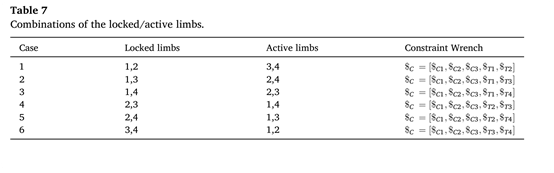
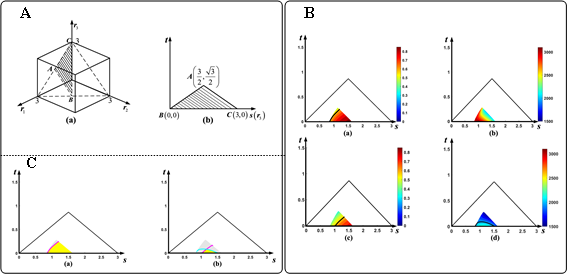
采用运动/力传递指标评价机构的运动学性能。由于冗余驱动踝关节康复机构具有四条分支,当锁定任意两条分支时,机构将增加两个线性无关的约束力螺旋,使其约束力螺旋总数达到5个。此时机构仅保留一个输出运动螺旋,由剩余分支的传递力螺旋驱动。该冗余驱动踝关节康复并联机构存在六种不同的分支锁定组合情形。相应的可能情形列于下表中。根据应用场景,选择运动/力传递指标大于等于0.6的位形定义为优质传递工作空间。冗余驱动与非冗余驱动踝关节康复机器人的运动/力传递指标分布如下图所示。可以看出,机构在靠近工作空间内部性能较好。相比非冗余驱动构型,冗余驱动机构展现出更优的运动/力传递性能。值得注意的是,非冗余机构的运动与力传递指标在部分工作空间内性能较差,其分布与正解雅可比矩阵行列式奇异区域高度吻合,表明该性能薄弱区域由机构接近奇异位形所致。
冗余驱动踝关节康复机构和其非冗余驱动形式的运动/力传递指标分布
▍机构的刚度性能分析:虚拟弹簧法和虚功刚度指标
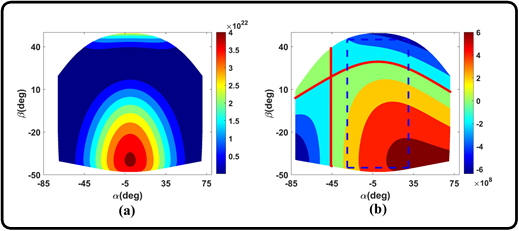
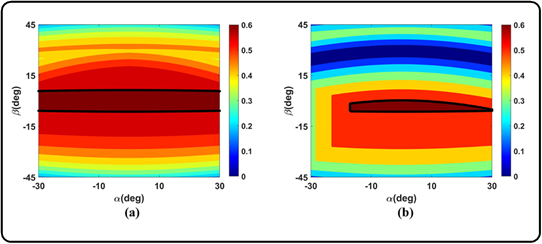
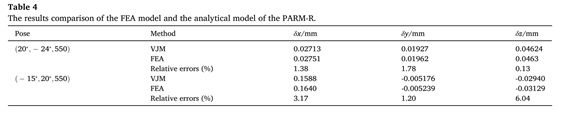
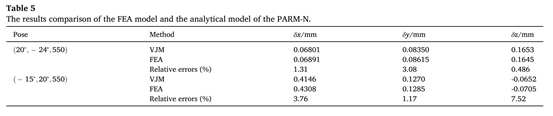
在刚度性能分析方面,使用VJM法建立机构的刚度模型。为验证所建立刚度模型的正确性,采用有限元分析软件进行对比验证,模型计算值与有限元结果的误差均小于10%(结果如下表所示),验证了刚度模型的有效性。基于推导的刚度模型,采用虚功刚度指标,对机构工作空间内的刚度性能分布进行量化分析。分析结果表明,当β在-10° ~30°范围外时,冗余驱动踝关节康复机器人的虚功刚度指标较好;当α在-10°~30°范围内,β在-45°~ 10°范围内时,非冗余驱动踝关节康复机器人的虚功刚度指标较好。
机构各支链的虚拟弹簧模型
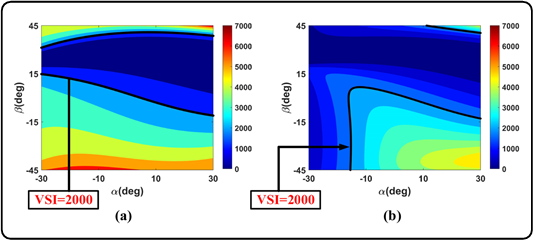
踝关节康复机器人的刚度性能分布
▍机构的尺寸优化:基于图谱法的多目标尺寸优化
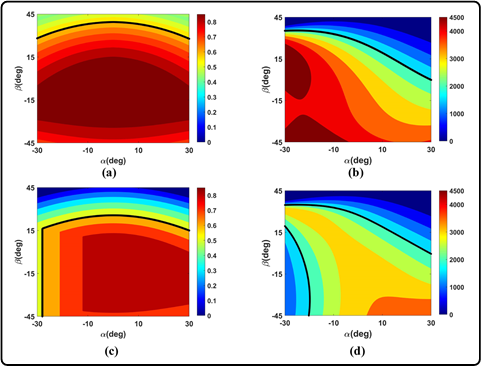
尺寸优化方面,为提升机构的综合性能,本文以全域运动/力传递指标及全域刚度指标为优化目标,并将机构的可达工作空间设为约束条件。采用图谱法对机构性能进行了优化,结果如下图所示。
基于踝关节康复场景需求,选取全域传递指标大于等于0.6且全域刚度指标大于等于2000的区域作为优化设计区域。可以看出,冗余驱动踝关节康复机器人具有更大的优化设计区域,可以为设计者提供更多的参数选择以满足不同的设计要求。
全域运动/力传递指标和全域虚功刚度指标性能分布与优化设计区域
从优化设计区域中选择一组设计参数(a1=180mm,b1=178mm,L1=213mm)作为优化后的设计参数,其性能分布如下图所示。与初始性能相比,冗余驱动踝关节康复机构的全域优质传递工作空间占比从0.14提升至0.889(增幅约535.0%),全域优质刚度工作空间占比从0.598提升至0.761(增幅约27.3%);非冗余驱动机构的对应指标分别从0.044和0.334提升至0.712和0.663(增幅约1518.18%和98.50%)。
同时,两种踝关节康复机器人的低性能区域均转移至工作空间边界,降低了其对康复训练的影响。此外,优化后的踝关节康复机构运动/力传递指标和虚功刚度指标的波动幅度明显降低,表明冗余驱动和非冗余驱动两种构型在工作空间内均能运行得更为平稳。
冗余驱动踝关节康复机构和其非冗余驱动形式优化后的性能分布
参考文章:
https://doi.org/10.1016/j.mechmachtheory.2025.106131
(文:机器人大讲堂)