
在物理人机协作(physical Human-Robot Collaboration,简称pHRC)领域,实现安全且高效的协作,精准的人类意图估计以及合理的人机角色分配是关键要素。这两者相互关联、缺一不可,直接影响到人机协作的整体效果与安全性。
从技术实现层面来看,目前行业内普遍采用的意图估计方法,主要依赖于短期运动数据。然而,这种方法存在明显的局限性。由于缺乏多步预测能力,机器人难以对人类意图的长期变化趋势进行感知。在复杂多变的人机协作场景中,人类意图并非一成不变,而是会随着任务进展、环境变化等多种因素动态调整。但基于短期运动数据的意图估计方法,无法提前预判这些潜在变化,进而导致机器人难以自主、合理地调整人机角色分配。
这种技术缺陷带来的直接后果,便是潜在的人机分歧,严重时甚至可能对协作任务的安全性和效率造成不利影响。因此,如何突破现有方法的局限,提升人机协作中的意图估计与角色分配能力,成为当前物理人机协作领域亟待解决的重要问题。
▍提出全新框架DTRT,破局物理人机协作难题
针对上述挑战,来自中国科学院自动化研究所与灵宝CASBOT的研究人员携手合作进行了深入研究,并共同提出了一种基于对偶Transformer的物理人机协作框架Dual Transformer-based Robot Trajectron,(以下简称“DTRT”)。
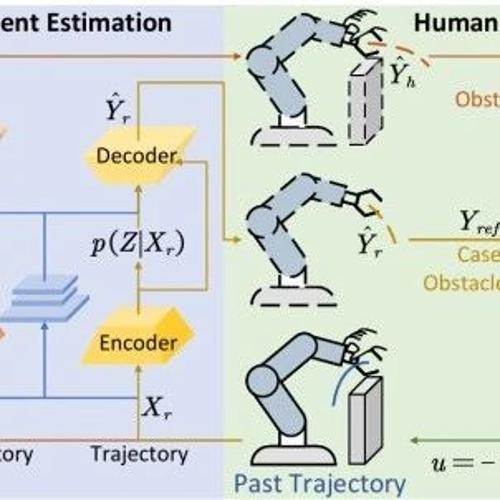
从技术实现角度来看,针对协作中“意图估计不准确、角色切换不灵活”的核心问题,DTRT通过采用分层结构,利用人类引导的运动和力数据来快速捕获人类意图变化,从而实现准确的轨迹预测和动态机器人行为调整,并最终实现有效的物理人机协作。
基于双变压器的机器人轨迹器,用于人类意图估计和角色分配
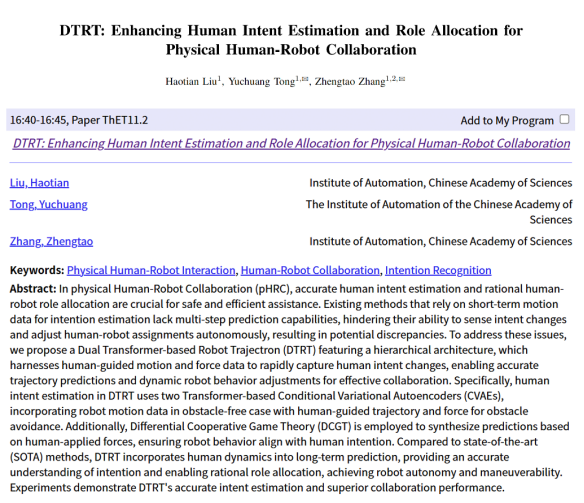
值得关注的是,其相关研究成果“增强物理人机协作中的人类意图估计和人机角色分配”方法(DTRT: Enhancing Human Intent Estimation and Role Allocation for Physical Human-Robot Collaboration)已获得机器人与自动化领域全球顶级会议ICRA 2025的录用。
▍面向物理人机协作关键挑战,革新意图估计与角色分配
物理人机协作(pHRC)在制造、医疗保健和服务等多个领域都发挥着重要作用,但要实现机器人与人类之间的无缝协作,就需要制定有效的策略确保机器人能够准确估计人类意图,并能够根据实际情况动态调整自身行为,以更好地协助人类开展工作。因此,精确的人类意图估计和合理的人机角色分配,成为提高pHRC性能的关键挑战。
从技术层面来看,基于人类意图对未来轨迹的准确预测,对于机器人辅助的有效性和pHRC的安全性而言意义重大。在存在潜在危险的复杂环境中,例如当机器人遇到未知障碍物时,人类意图可能会迅速发生变化,这给意图估计工作带来了巨大的挑战。目前,主流的方法主要依赖于短期运动数据,如位置和速度等信息。然而,这些短期数据在检测人类意图变化方面存在明显局限,进而影响了预测的准确性和安全性。此外,短期数据还会降低长期协作中意图估计的有效性。因此,研究如何将人类施加的力量整合到pHRC的长期预测方法中,对于实现准确的意图估计至关重要。
与此同时,人机角色分配涉及一种复杂的机制,该机制负责在人类和机器人之间分配任务控制权。这一过程需要实时协调人机关系,以减少分歧,提高机器人的辅助水平。现有的人机角色分配方法主要依赖阻抗/柔顺性控制,通过修改模型参数来确定角色。在各种方法中,基于博弈论的角色分配模拟了多参与者之间的协作过程,将目标设定为最小化成本函数,以实现最优的人机协同关系。但即便如此,确保机器人行为与人类意图保持一致,同时又能维持机器人的自主性和灵活性,仍然是一个亟待解决的重大挑战。
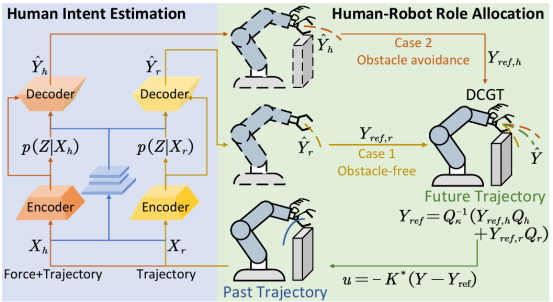
就如何在物理人机协作领域提升人类意图估计和人机角色分配的准确性这一关键目标,DTRT框架做出了创新性的探索。其人类意图估计模块利用了两个基于Transformer的条件变分自编码器(Conditional Variational Autoencoder, CVAE)。具体而言,该模块将机器人在无障碍物情况下的运动数据与避障时人类引导的轨迹和力进行了有机结合。
为了确保机器人的行为与人类意图一致,研究团队还采用了基于人类施加力的微分合作博弈论(Differential Cooperative Game Theory,简称DCGT)与现有方法相比,DTRT将人类动态纳入长期预测,提供更准确的意图理解,进而实现合理的人机角色分配,提升机器人的自主性和可操作性。
综合来看,DTRT框架的核心优势主要体现在以下三个方面:
其一,DTRT框架将人类意图估计与人机角色分配紧密结合。这种结合方式能够敏锐地检测人类意图的变化,并及时采取措施减少人机分歧,从而有效提升了在复杂且危险易发环境中的人机协作性能。
其二,DTRT框架中的基于分层结构的人类意图估计模块,能够同时处理人机协作过程中的运动和力数据。通过这种方式,该模块提高了人类意图的预测精度,使系统能够对人类意图有更为准确的理解。
其三,基于微分合作博弈论的人机角色分配机制,实现了基于人类施加力的自适应领导者切换。这一机制确保了机器人的行为与人类意图高度一致,在保持机器人自主性的同时,最大程度地减少了人机之间的分歧。
▍进行实验对比,验证DTRT框架有效性
为验证所提出的DTRT框架的有效性,研究团队开展了一系列对比实验,并对实验结果进行了深入分析。
在实验过程中,研究团队对障碍物进行了替换和随机定位操作。在评估物理人机协作性能时,研究团队采用了以下关键指标:
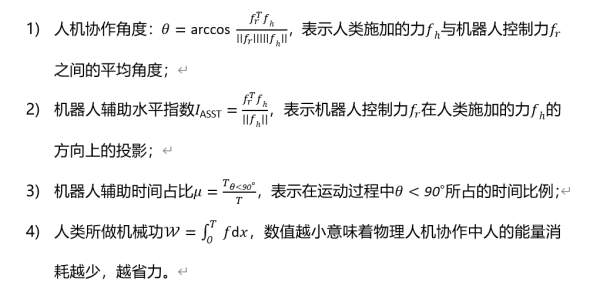
实验结果表明,DTRT框架在预测精度与协作表现方面展现出显著优势,在多个物理人机协作关键指标上均呈现出卓越性能。具体而言,DTRT框架下的平均人机协作角度达到76.4°,平均机器人辅助水平指数为1.5,且人机系统在61.8%的时间内处于良好的协作状态。此外,DTRT框架下的人机角色分配机制有效地平衡了机器人的自主性和人类引导,使得人类机械功仅为3.5 J。
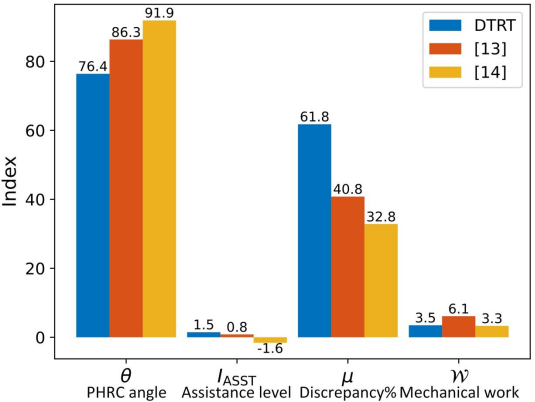
DTRT与现有方法在指标上的定量对比
总体来看,DTRT框架能够准确估计人类意图的变化,合理分配领导者和追随者的角色,不仅有效降低了人机之间的分歧,还显著提高了机器人的辅助水平,有力地推动了安全高效的物理人机协作,具备巨大的应用潜力。
▍结语
DTRT的提出,其意义远不止于算法层面的突破,更是一次“人机关系”重构的尝试,为人形机器人的发展提供了一条兼具通用性与工程价值的技术路径。
展望未来,DTRT的研究思路及其核心机制,有望在灵宝CASBOT所聚焦的工业制造、复杂作业、服务协同等多个实际应用场景中得到进一步拓展与深化,从而为物理人机协作领域带来更多的创新与发展。
(文:机器人大讲堂)