
仿生机械手凭借高度灵活的关节设计和精准的抓取能力,在医疗康复、工业制造、特殊作业等领域展现出巨大的应用潜力。
然而,在灵巧机械手设计领域,要实现接近人类手部的高灵活性和适应性,仍存在诸多技术难题。尽管模仿肌肉骨骼构造的仿生设计已取得一定进展,但如何在降低系统复杂性的同时,保留关键运动学和力学原理,依然是亟待解决的问题。
▍提出新思路,实现仿生机械手精准控制
面对上述挑战,来自上海交通大学机械与动力工程学院的朱向阳教授研究团队针对仿生机械手的高度灵巧性和适应性问题展开研究,并通过建立数学模型深入分析手指运动学、软硬结合原理和可控驱动机制,提出了一种适用于高度灵巧和自适应的软硬结合仿生机械手设计,实现了可控主动移动性和被动自适应性的更理想的集成,让机械手指拥有更灵巧的动作和交互。
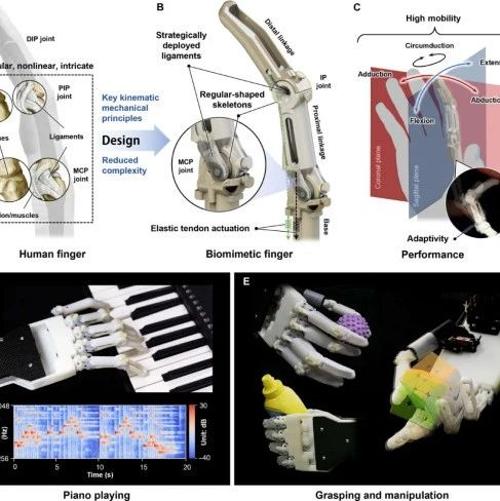
图1仿生指的设计理念、工作原理和应用
实验结果显示,该软硬结合的仿生机械手设计,让机械手在钢琴演奏中可以100%准确弹奏所有音符、最多可以跨越10个音符、支持快速切换弹奏音符,具备为同一音符产生不同声级的能力。并且在抓取实验中,机械手可以完成连续旋转旋钮、拇指对位、手指屈曲和手指外展内收、对保定球进行手内动作、连续转动魔方的不同表面。其总体性能展现出拟人化机械手的高度的灵活性和功能性,为精细任务的处理开辟了更多可能性。
值得关注的是,该方法基于手指运动学建立数学模型,采用骨骼、韧带和驱动机构三个基本结构来设计仿生手指。通过将弹簧与两条肌腱通路相结合,保持了关节的顺应性并模拟了生物对应的弹性。其中,弹性韧带用于稳定关节并提供柔顺性弹性,软韧带和刚性BRE机制则进行生物启发的协调相互作用。这种创新设计替代了典型的软关节/手指设计,成功捕捉到了人类手指运动学和力学的精髓。
前不久,该研究成果的相关论文已以“Biomimetic rigid-soft finger design for highly dexterous and adaptive robotic hands”为题发表在《Science Advances》上,为仿生机械手领域的研究提供了重要的理论和实践参考。
那么,该研究具体内容如何么?接下来和机器人大讲堂一起深入了解~
▍创新设计结合动力学,构建软–硬结合拟人化机械手
据悉,该创新型的仿生机械手融合了手指运动学、软硬结合原理和可控驱动技术。受人类手指解剖结构的启发,研究团队设计出由骨骼、韧带和驱动机构三个基本结构组成的硬–软混合仿生机械手。其中,骨骼结构包含基部、近端连接和远端连接部分,近端连接通过掌指(MCP)关节连接到基底,远端连接通过指间(IP)关节连接到近端连接。MCP 关节主要实现屈伸(旋转角度 θ)、外展内收(旋转角度 φ)以及有限的外展,IP 关节只允许屈伸(旋转角度 ζ) 。

图2 机械设计和结构分析:(a) 多关节仿生指的活动度(b) MCP 接头的软硬混合结构(c-d)BRE 机构的运动学建模与参数(e) 弹性韧带屈曲拉伸的建模 (f) 韧带拉伸过程中的有限元分析(g) 韧带材料的选择基于恢复角度误差和所需的驱动扭矩
在肌腱驱动仿生手指设计中如图 2(b)所示,研究团队将肌腱穿过MCP和IP关节实现欠驱动屈曲,模仿人类的深屈肌腱;另一根肌腱则穿过MCP关节进行外展,通过弹性韧带实现关节内收与肌腱的松解功能。研究团队将弹簧与两条肌腱通路相结合,并连接到致动器,既保持了关节的顺应性,模拟生物对应的弹性,又实现了对肌腱位移的精确调节。这种软硬结合系统,平衡了机械手刚性和软性结构的协调互动,提升了其灵巧性和适应性。
▍进行动力学建模:模拟人类MCP关节设计
MCP关节的设计在手指功能中至关重要,其设计包括一个带有椭圆块的球环对(BRE结构),并辅以外侧弹性韧带。在BRE结构中,磁环以亚毫米级间隙松散地环绕球,以执行屈伸、外展内收和外展的旋转运动。椭圆块的作用是将手指的运动限制在类似于人手指的狭窄工作空间内。当磁环从完全伸展位置移动到完全弯曲位置时,外展范围逐渐减小来复制人体MCP关节表面的骨骼约束。

为了更精确的模拟人类手指运动,构建软–硬结合的高度灵巧和适应性的机械手,研究团队开发了一个理论模型来分析BRE机构的尺寸参数对其工作空间的影响,从而复制人体MCP关节的运动学。
▍开发仿生原型,打造更类人机械手
为了验证团队所设计仿生指的性能,研究团队采用高分辨率打印机,通过PolyJet 3D 打印和软成型技术,制造出具有不同模量和复杂结构的手指原型,并将用于屈曲的弹簧连接肌腱(f 肌腱)和外展肌腱(a 肌腱)在位置控制模式下连接到伺服电机上的滑轮。
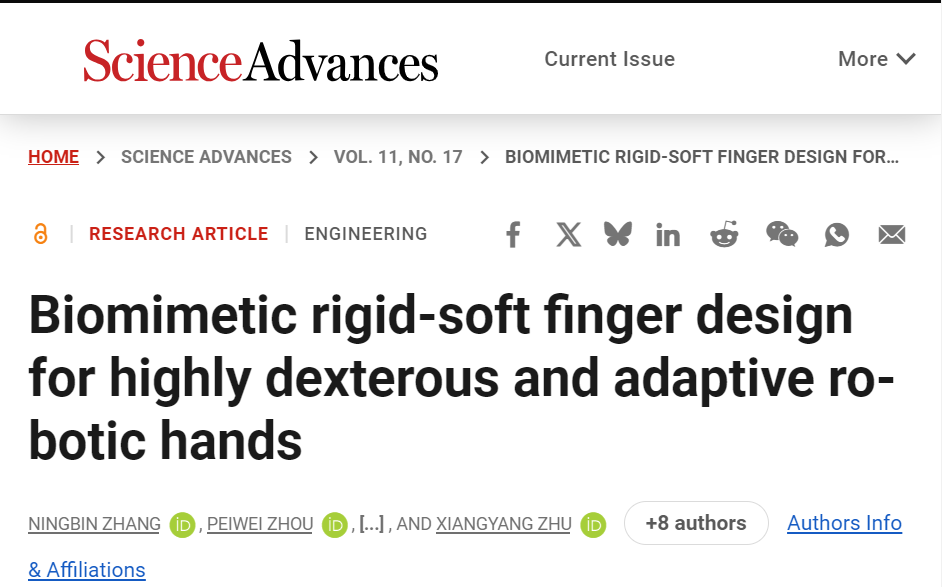
实验显示,在肌腱驱动时,手指可以进行屈曲–伸展和外展–内收的主动运动,如图 3(a)。屈伸循环和外展内收循环的最大手指速度分别为106.3° 和 88.5°/s。如图3(b)所示。弹性成分(即韧带、弹簧和伸肌)为手指提供了上述运动的弹性和外力下的可恢复外展。
图 3 运动学和机械性能表征 (a)主动和被动的手指运动(b) 肌腱位移与相应关节角度的关系(c) 测量指尖力 f 的实验装置屈曲(d-h)指尖力 f 的研究数据
为了研究手指在接触物体时产生的力,研究团队分析了f-肌腱位移(∆l挠曲)对指尖输出力的影响。实验中,手指由肌腱驱动至不同的屈曲角度,其指尖在无负载状态下轻触力传感器。随后,手指持续动作,逐渐增加指尖的施力,即屈曲力,并对此进行了3次测量。结果显示,力挠曲通常随位移∆l挠曲的增加而增大,但与初始角度θinitial并无正相关关系,这一现象是通过连接肌腱的细长弹簧传递所观察到的。
此外,该仿生指屈伸运动响应时间为 220 毫秒,外展内收运动响应时间为 170 毫秒;屈伸运动带宽约为 1.25 Hz,外展内收运动带宽约为 3.70 Hz,这些动态性能指标与人手日常活动需求基本相当。
▍进行仿真与实验验证,场景测试展示实用价值
为了进一步开发手指设计的应用潜力,研究团队开发了一种将四个手指和一个对立拇指集成的拟人化机械手,如图4(a)所示。其中,相对拇指由腕掌骨(CMC)关节和拇指 MCP(TMCP)关节组成。CCMC关节采用伺服电机直接驱动,实现拇指的精准对立动作,且其运动范围经优化设计限定在0°至45°,以完成有效的屈曲运动。TMCP关节则运用肌腱驱动方式,用于执行拇指的外展与内收动作,提升拇指的灵活性及完成精细、复杂操作的能力。

图4 拟人机械手的发展及其钢琴演奏技巧
1. 钢琴演奏应用场景
在钢琴演奏实验中,仿生机械手表现出色。音阶演奏时,能准确跨越10个音符,每个手指准确地按下相应的键(n = 5次重复);滑音演奏中,小指被动外展–内收与琴键平滑互动,展现其较强的自适应交互能力;在和弦弹奏中,仿生机械手也能实现精确协调多个音符并快速切换,和弦音间延迟低于人类听觉感知阈值;此外,机械手还能通过改变电机速度为同一音符产生不同声级,且音高不变。这些结果充分证明了机械手在模拟人类钢琴演奏方面的高效性和精确性。
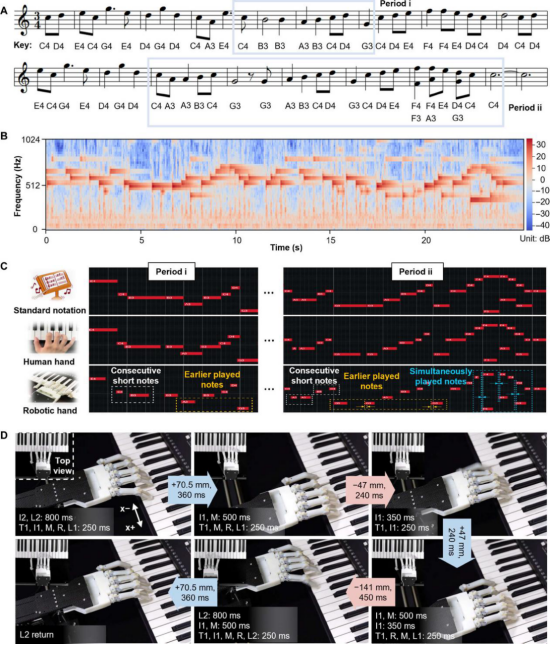
图5 评估演奏不同音乐风格的拟人化机械手
为了进一步评估机械手在音乐作品方面的演奏能力,研究团队通过两首风格不同的乐曲——抒情的《Always with me》(跨度两个八度)和技术性较强的《Jasmine flower》(跨度三个八度),进行测试。实验结果显示,在演奏《Always with me》时,拟人化机械手无需全手动作即可精准弹奏所有音符,频谱分析显示准确率达 100%,体现了高精准度。通过 MIDI 信号对比分析发现,机械手演奏的连续短音符时间间隔略长,部分音符因拇指直接演奏而更早发出,且音符结束时间较标准记谱法稍早。而演奏《Jasmine flower》对机械手提出了更高的要求,在演奏过程中需要协调实现全手平移。尽管如此,机械手依然以 100%的准确率完成了演奏,展现了出色的灵巧性和适应性。这些实验结果表明,拟人化机械手具备从精细控制到快速协调运动的广泛能力,在音乐领域具有潜在的应用价值。
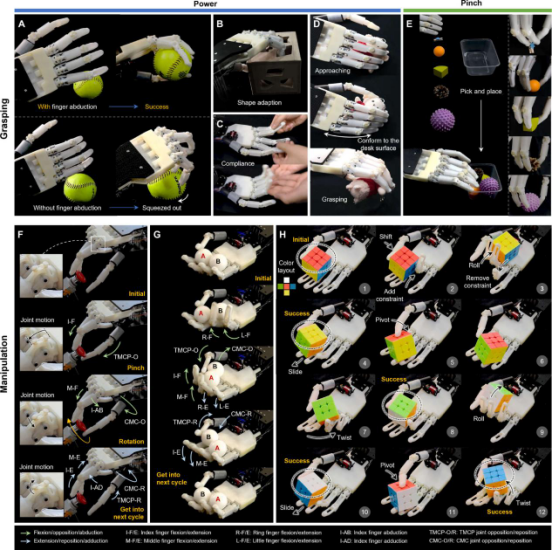
2. 灵巧抓取与操作应用场景
为了说明拟人化机械手的多功能性,研究团队进行了力量抓取和捏握等一系列抓取测试。实验结果显示,仿生机械手可以通过循环运动连续旋转旋钮(直径 36 mm),包括拇指对位、手指屈曲和手指外展内收。机械手还可以通过拇指对位重新定位和手指的顺序屈伸来对保定球(直径 40 毫米)进行手内操作,在纵保定球时依然坚固,展示了软硬结合设计在不确定条件下的优势。此外,机械手还可以通过可编程的手指步态连续转动魔方(边长 55 毫米)。通过以上三个实验任务,充分展示了拟人化机械手的手指柔度,它通过对“软”约束和控制来减轻接触的不确定性,这与传统机械手的工作原理不同,为仿生机械手在抓取与操作领域的应用提供了新的思路。
▍结语与未来
仿生高度灵巧和适应性机械手拓宽了仿生机械手在精细任务中的可能性。该研究相比于目前的机械手,表现出高度的灵活性和功能性,在钢琴演奏实验中表现出的流畅键盘敲击交互,充分证明了其在处理精细化复杂任务中的应用价值。
该研究提出的软硬结合仿生机械手设计,不仅能弹奏钢琴等复杂动作,还可应对实际应用任务。这种设计显著弥合了仿生机械手在专业与通用应用间的差距,为其多领域发展及实践应用拓宽了前景,有力推动了仿生机械手技术的多样化与实用化进程。
展望未来,该团队将在现有研究基础上,着力增强仿生机械手的灵巧性与功能性。他们计划深入探索提升机械手的长期可靠性、优化触感技术以及增强其自适应柔顺性等关键技术。这些技术将为假肢、人形机器人和人机协作等实际应用带来创新突破,推动仿生机械手技术向更实用化的方向发展。
参考文章:
https://www.science.org/doi/10.1126/sciadv.adu2018#sec-1
(文:机器人大讲堂)