
当前限制人形机器人规模化落地的主要因素有两点,第一是机器人的泛化能力有限,在实际场景下技术的迁移能力远远不够,导致其无法在具体环境中部署。第二是制造成本限制,主流人形机器人本体价格普遍在50万左右,个别高端型号甚至达到百万级别。
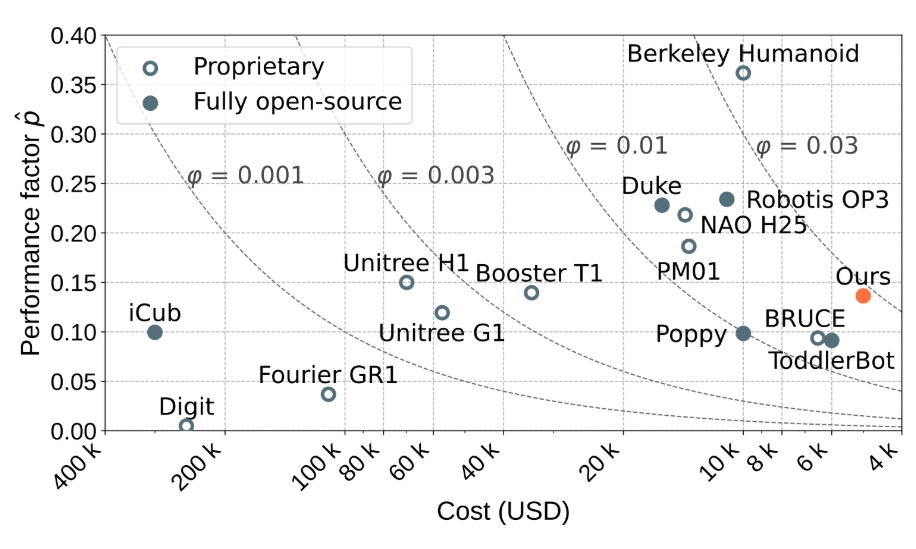
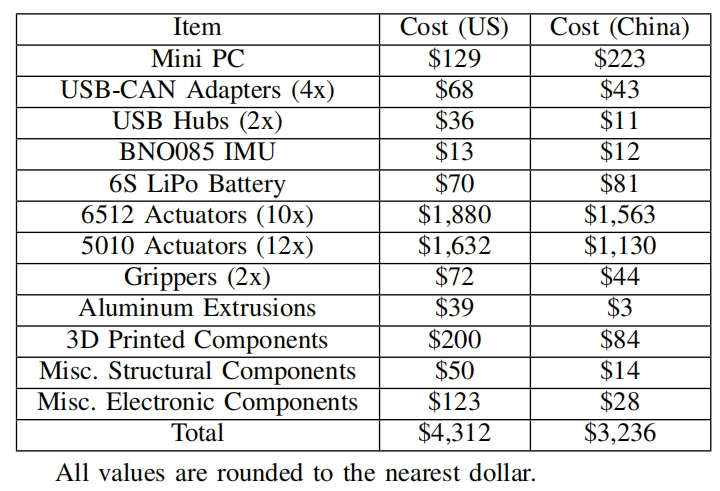
高昂的开发成本、闭源的设计架构及有限的定制能力,成为制约该领域快速发展的主要瓶颈。为解决这一问题,加州大学伯克利分校池宇峰团队打造了一款低成本开源人形机器人Berkeley Humanoid Lite,该机器人采用桌面3D打印制造,支持定制化设计,本体BOM成本在5000美元以内,约合35000元人民币。
▍成本破局!低成本3D打印专为开发者量身打造!
当前市场上的人形机器人平台主要分为商业产品和研究原型两类。商业产品如Agility Robotics的Digit、Fourier Intelligence的GR1等,虽然性能卓越,但价格普遍超过数万美元,使得大多数研究机构和个人难以承受。此外,尽管研究原型具备较高的定制性与性能表现,但因其制造依赖CNC加工、激光切割等专门流程,而这类设施并非所有研究机构都能轻松获取,从而严重限制了其广泛应用范围。
开源硬件与软件在推动技术创新及促进协作方面,蕴含着巨大潜力。通过公开共享设计文件与代码,研究人员得以相互学习、取长补短并持续改进,进而加速技术的迭代进程与优化升级。在人形机器人这一前沿领域,开源特性与定制化需求显得尤为迫切。这不仅能够有效降低开发成本,还能提高系统的灵活性和适应性,推动技术的普及和应用。
Berkeley Humanoid Lite的核心设计理念聚焦于开源与可定制。研究团队为用户提供了全面且完整的硬件设计文件、嵌入式代码,以及训练和部署框架,使用户能够依据自身实际需求,自由地对相关内容进行修改与定制。
为降低使用门槛,Berkeley Humanoid Lite采用3D打印技术,并选用现成电子元件,成功将总硬件成本控制在5000美元以内。这一价格远低于市场上同类商业产品,让更多研究机构和个人能够负担得起。研究团队通过优化设计与供应链管理,巧妙地将高性能与低成本融为一体。
在模块化与易制造方面,Berkeley Humanoid Lite的设计着重突出这两大特性。其所有结构部件均可通过标准桌面3D打印机制造,电子和机械部件则能从主流在线供应商处轻松购得。这种设计模式大幅降低了制造复杂度,提升了系统的可维护性与升级性。此外,模块化设计使用户能够根据实际需求,便捷地更换或升级部件,进而延长系统的使用寿命。
▍Berkeley Humanoid Lite本体结构与机械设计原理解析
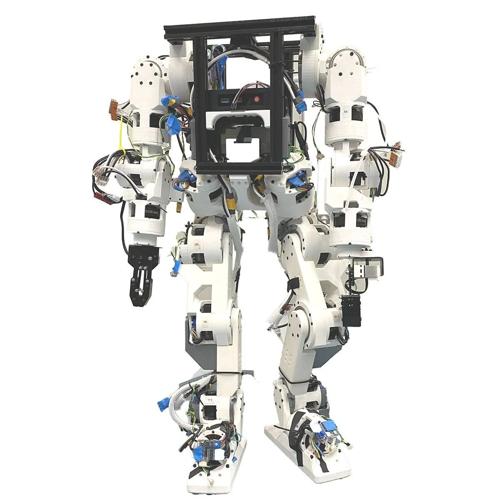
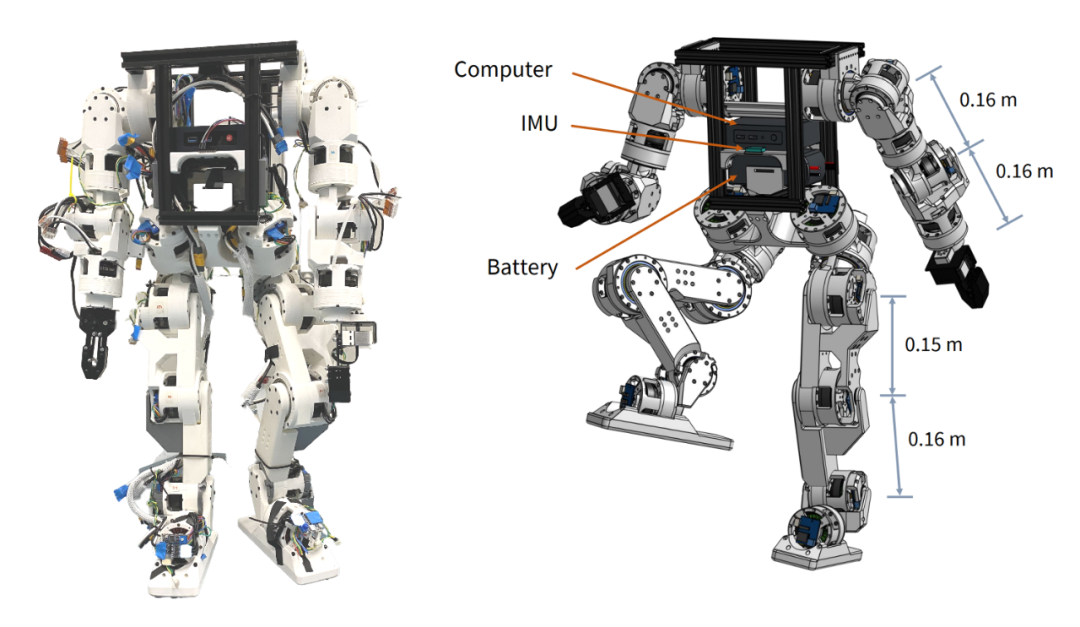
Berkeley Humanoid Lite定位于中型尺寸人形机器人平台,身高为0.8米,体重16公斤。该平台的主要机械部件涵盖腿部和臂部的关节驱动器、躯干结构,以及集成在手机级IMU(惯性测量单元)上的位置传感器。
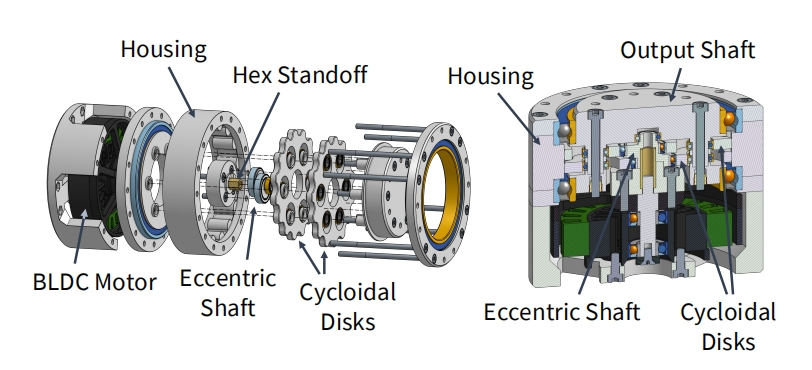
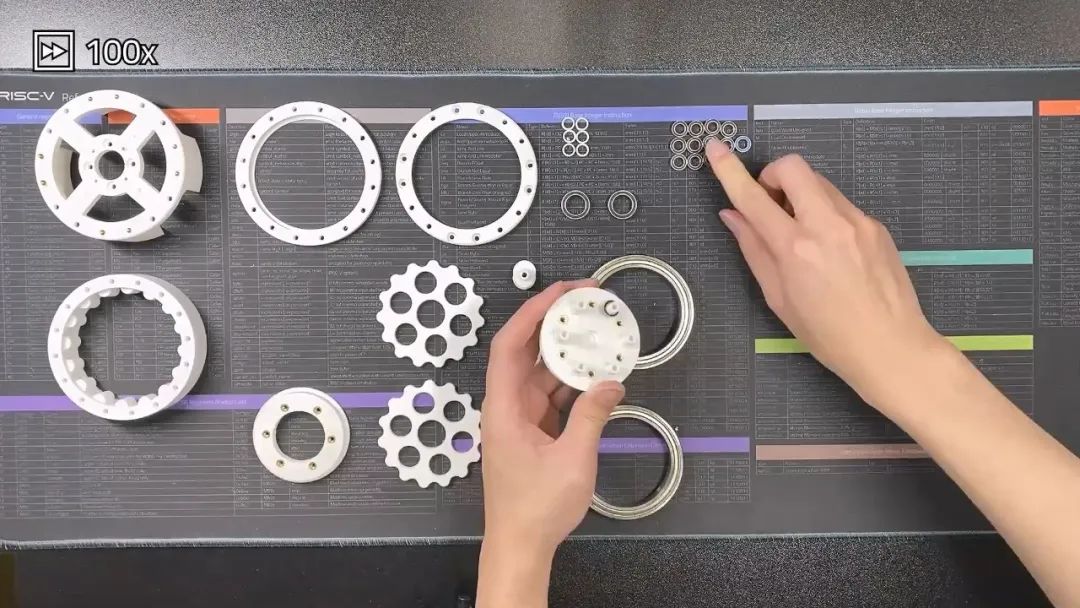
关节驱动器运用了3D打印的摆线齿轮箱设计,可直接驱动腿部和臂部的关节运动。摆线齿轮借助多个齿同时啮合来分散载荷,有效提升了齿轮的承载能力与使用寿命。不仅如此,研究团队还对齿轮参数和制造工艺进行了优化,进一步提高了齿轮的传动效率和精度。

躯干结构采用铝型材搭建,具备高刚性和轻量化的特性。铝型材之间通过螺栓连接,构建出稳定的结构框架。同时,躯干上集成了手机级IMU,可实时监测机器人的姿态和运动状态。IMU所采集的数据通过USB接口传输至控制计算机,为机器人的运动控制提供关键反馈信息。
Berkeley Humanoid Lite的电子系统主要由控制计算机、关节驱动器控制器、IMU以及电源管理模块构成。其中,控制计算机选用Intel N95迷你PC,充当低级控制计算机。关节驱动器控制器通过CAN总线与控制计算机进行通信,实现精准的关节位置控制。IMU数据同样通过USB接口传输至控制计算机,为运动控制算法提供实时反馈。电源管理模块则承担着为整个系统提供稳定电力供应的重任。
▍实验与验证环节Berkeley Humanoid Lite综合性能表现出色
在关节驱动器性能测试环节,研究团队着重对摆线齿轮箱设计的关节驱动器进行了效率、传动刚度以及耐久性等多项指标的评估。效率测试结果显示,在多数工作条件下,关节驱动器展现出高效的能量转换能力,机械效率稳定保持在90%左右,这表明其能够有效地将电能转化为机械能,大幅减少了能量在传动过程中的损耗,为机器人长时间稳定运行提供了有力保障。
传动刚度测试中,尽管3D 打印的齿轮箱在刚度上相较于传统金属齿轮箱略有逊色,但研究团队通过精心优化齿轮设计,并增加必要的支撑结构,使得关节驱动器的传动刚度达到了满足整机运动需求的理想水平,确保了机器人在运动过程中关节传动的精准性和稳定性。耐久性测试更是持续了数百小时,期间关节驱动器始终保持稳定运行,性能未出现明显下降,充分证明了其具备良好的耐久性和可靠性,能够适应长时间、高强度的工作场景。
整机行走实验是验证Berkeley Humanoid Lite 实际运动能力的关键环节。实验设置了多种复杂地形,包括平坦地面、不同坡度的斜坡以及高低不一的台阶等。在平坦地面上,机器人行走姿态稳定,步伐流畅,能够精准地按照预设路径前进、后退、转弯,展现出良好的基础运动能力。
面对斜坡时,机器人能够根据坡度自动调整身体重心和腿部发力方式,保持平衡并顺利攀爬或下行,体现了其出色的适应能力和动态平衡控制能力。
在台阶环境中,机器人通过精确的腿部关节控制和身体姿态调整,一步一步稳健地上下台阶,充分证明了其在复杂地形下的行走能力和运动协调性。通过不断调整控制参数和优化步态规划算法,机器人对各种复杂环境的适应能力得到了进一步提升,为未来在实际场景中的应用奠定了坚实基础。
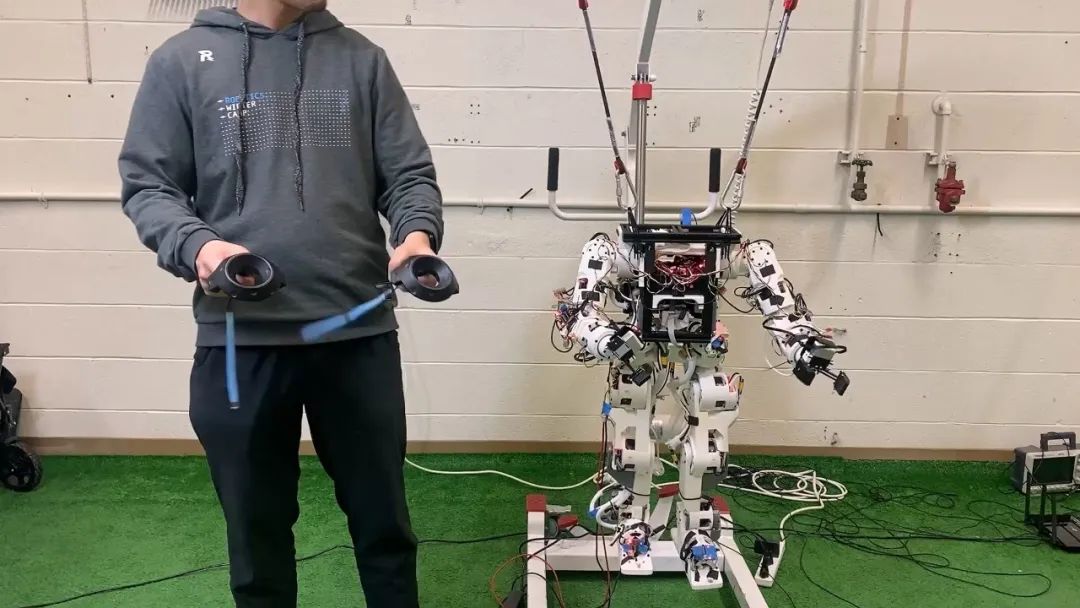
遥操作实验则聚焦于验证机器人在人类操控下的操作精度和实时性。实验中,操作员通过专门的遥操作设备向机器人发送指令,控制其完成书写、抓取与放置物体等复杂任务。
在书写任务中,机器人能够准确跟随操作员的指令,在指定位置书写出清晰、规整的字符,展现出较高的操作精度。
抓取与放置物体任务中,机器人能够根据物体的形状、大小和位置,精准地调整手臂姿态和手指抓握力度,顺利完成抓取、搬运和放置等动作,且整个过程流畅自然,实时性良好。这表明Berkeley Humanoid Lite 在遥操作模式下具备出色的操作能力和响应速度,能够满足多种实际应用场景的需求。
▍结语与未来:
Berkeley Humanoid Lite 作为一款开源、可定制且经济实惠的 3D 打印人形机器人平台。它借助模块化设计理念,运用 3D 打印技术,并采用现成的电子元件,大幅降低了人形机器人的开发成本,同时有效简化了制造流程、降低了制造复杂度。未来研究团队将持续对平台设计进行优化,着力提升系统的稳定性与适应性,进一步挖掘该平台的潜在应用价值。
论文地址:https://arxiv.org/pdf/2504.17249
(文:机器人大讲堂)